Chinese version of the README -> please click here
cd $HOME/catkin_ws/src
git clone https://github.com/Dobot-Arm/CR5_ROS.git -b kinetic-devel
cd $HOME/catkin_ws
# building
catkin_make
# activate this workspace
source $HOME/catkin_ws/devel/setup.bash
cd $HOME/catkin_ws/src
git clone https://github.com/Dobot-Arm/CR5_ROS.git -b melodic-devel
cd $HOME/catkin_ws
catkin_make
source $HOME/catkin_ws/devel/setup.bash
echo "export DOBOT_TYPE=cr3" >> ~/.bashrc
source ~/.bashrc
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
source ~/.bashrc
echo "export DOBOT_TYPE=cr10" >> ~/.bashrc
source ~/.bashrc
echo "export DOBOT_TYPE=cr16" >> ~/.bashrc
source ~/.bashrc
-
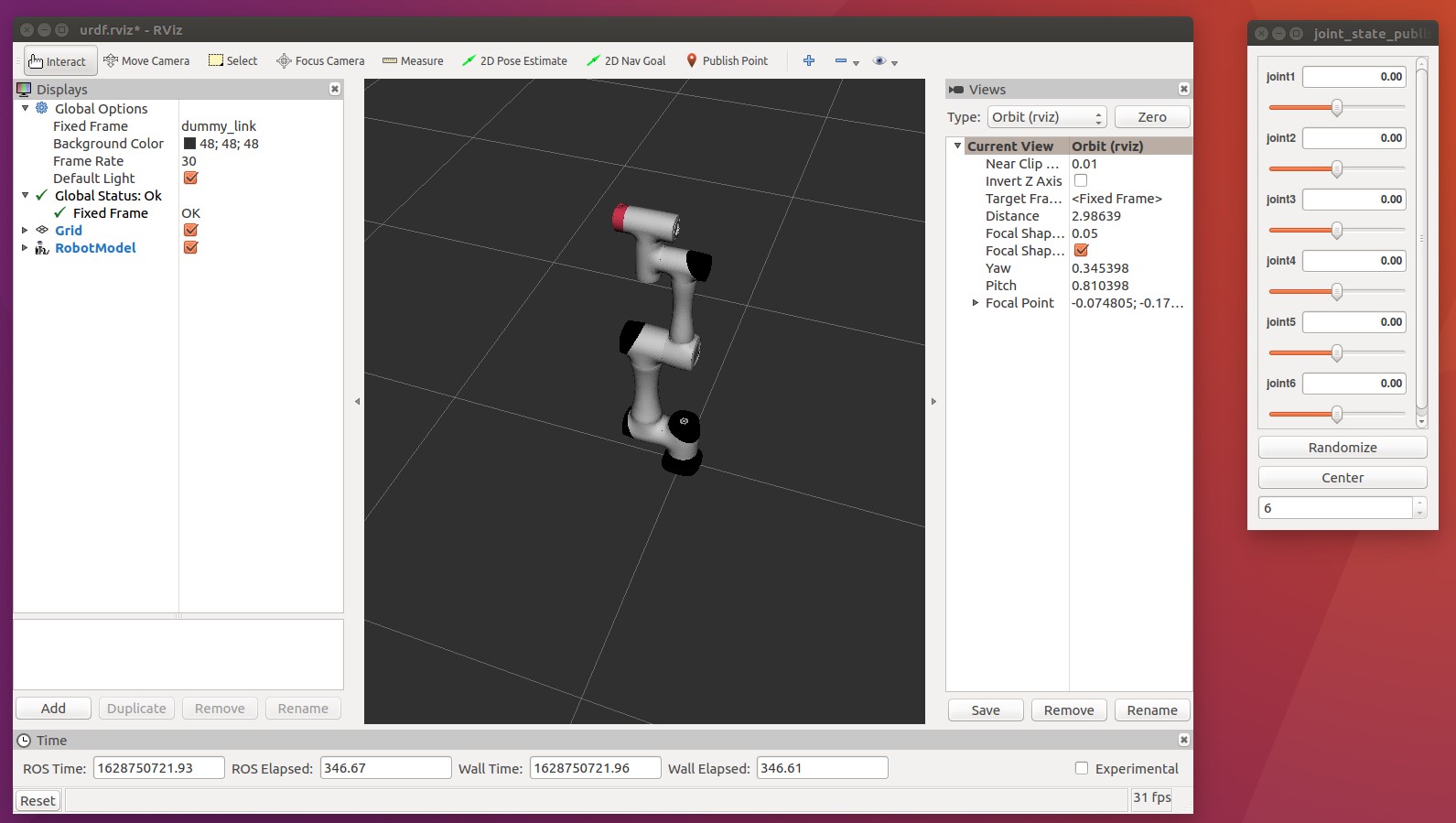
roslaunch dobot_description display.launchUser can adjust the angle of each joint by joint_state_publisher_gui, and see the result from rviz
-
- Active moveit by the following commands
roslaunch dobot_moveit demo.launch- Drag the joint to any direction, then click "Plan and Excute" to see the result
-
- Start Gazebo with the following command
roslaunch dobot_gazebo gazebo.launch- Again, you can use MoveIt! Control the gazebo robots
- For setting up the MoveIt! nodes to allow motion planning run.The dobot type needs to correspond
roslaunch cr5_moveit cr5_moveit_planning_execution.launch sim:=True- For starting up RViz with a configuration including the MoveIt! Motion Planning plugin run.The dobot type needs to correspond
roslaunch cr5_moveit moveit_rviz.launch config:=True- Drag the joint to any direction, then click "Plan and Excute" to see the result


-
Connect the robotic arm with following command, and robot_ip is the IP address that the real arm locates
roslaunch dobot_bringup bringup.launch robot_ip:=192.168.5.1 -
Active Moveit with following command
roslaunch dobot_moveit moveit.launch -
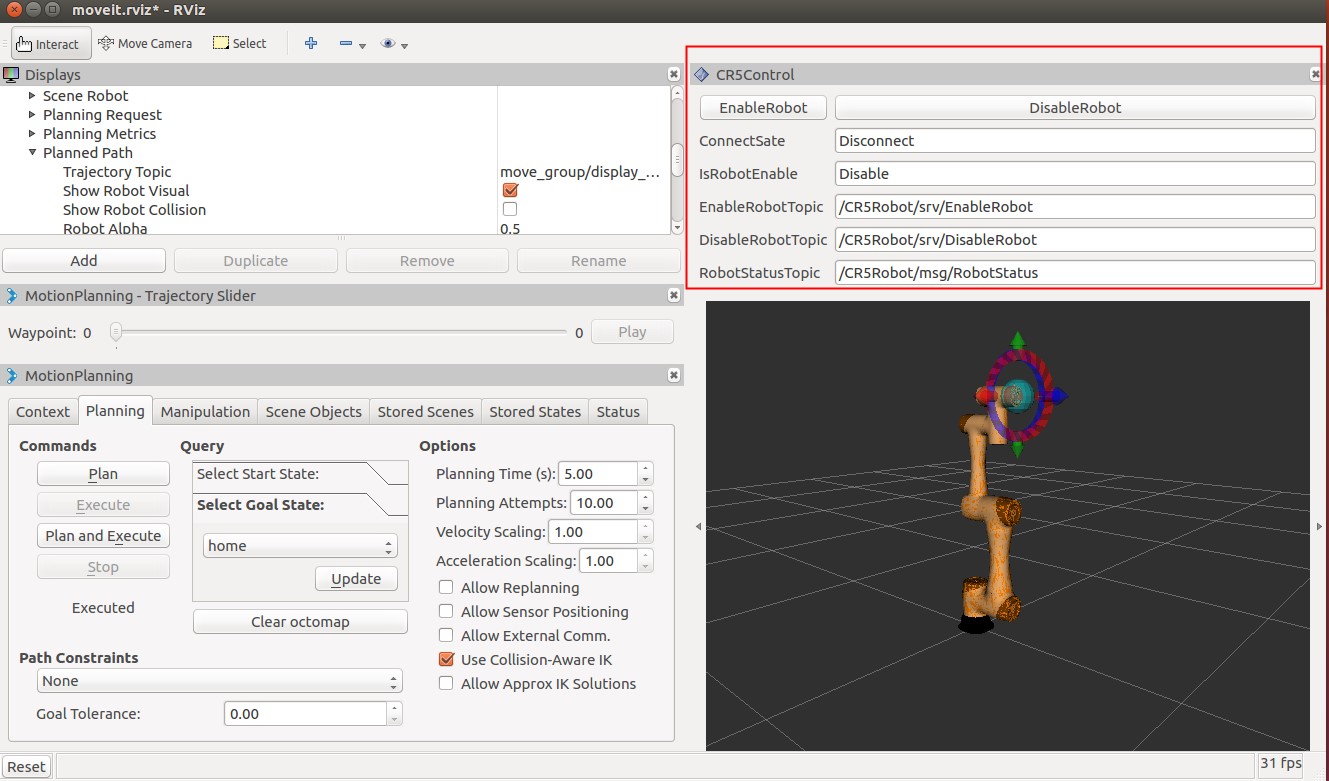
Install DobotControl Plugin to enable the robotic arm
- Press Panels on the tool bar of rviz --> "Add New Panel"
- Choose DobotControl, then press "OK"
- Press "EnableRobot" to enable the arm
- When "Connected" and "Enable" is displayed on the status bar, it means the robotic arm is connected and enabled, and users can control the robotic arm via Moveit

Msg and srv is defined in dobot_bringup. Users can control the robotic arm via those underlying commands