Analysis-simulation-and-control-of-a-6-DOF-robot
Analysis, simulation and control of a six-degree-of-freedom robot
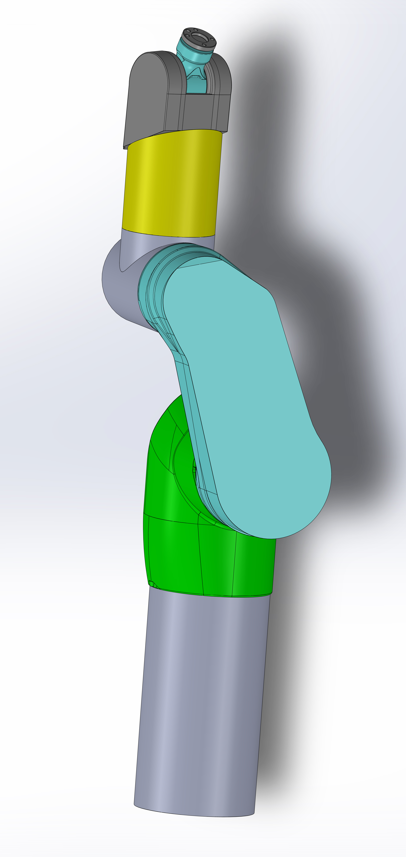
Design of robot in SolidWorks
- Design and Simulation of robot using SolidWorks
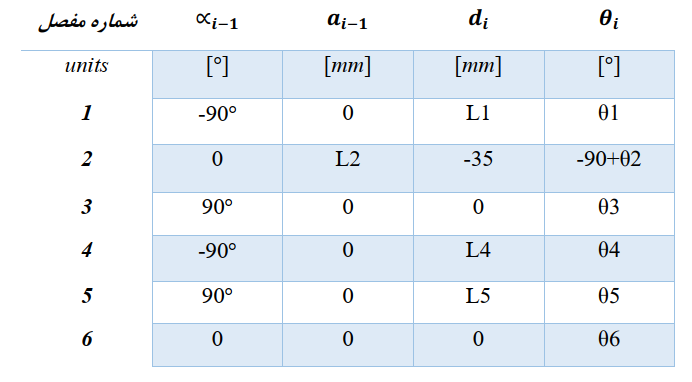
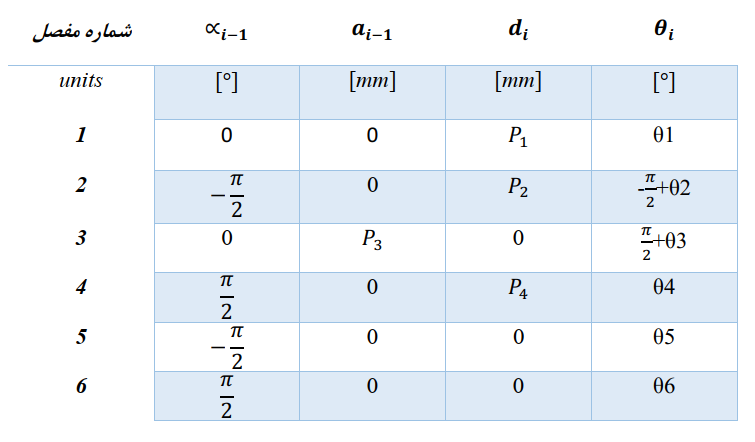
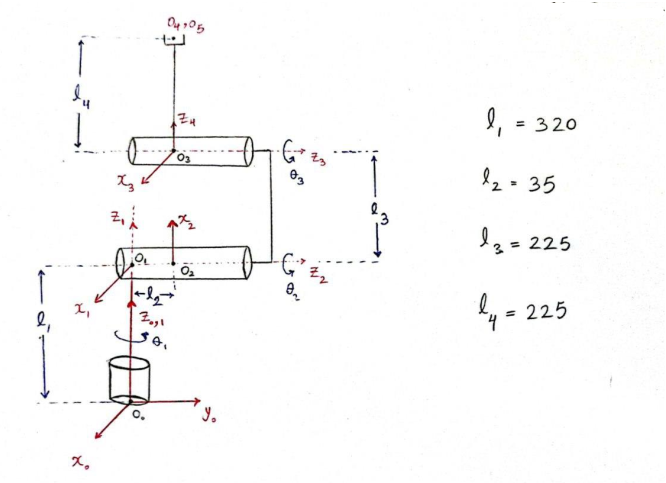
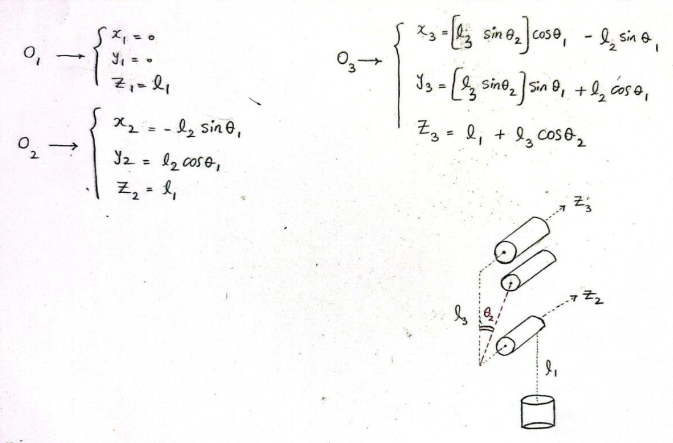
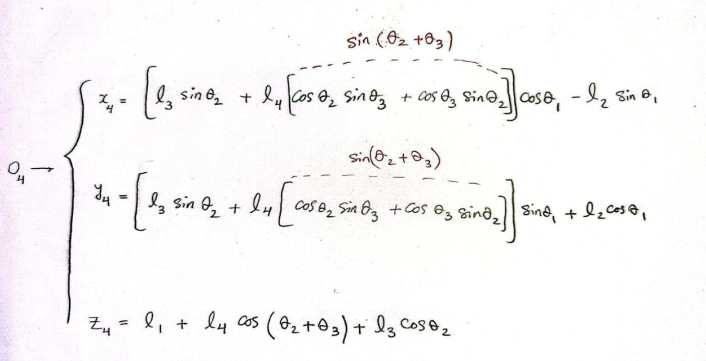
- Classic & Modified Denavit-Hartenberg Parameter Table
---
## Design of robot in SolidWorks
- Calculating D,C and G Dynamic Matrices for Robot
$$D(q)=\sum_{i=1}^n\left(m_i * J_{v_i}(q)^T * J_{v_i}(q)+J_{w_i}(q)^T * R_i(q) * I_i * R_i(q)^T * J_{w_i}(q)\right)$$
$$C_{i j k}=\frac{1}{2}\left\{\frac{\partial d_{k j}}{\partial q_i}+\frac{\partial d_{k i}}{\partial q_j}-\frac{\partial d_{i j}}{\partial q_k}\right\}$$
$$\begin{aligned}
&P=m_i * g * h_i\\\
&G=\left[\begin{array}{c}
\frac{\partial P}{\partial q_1} \\\
\frac{\partial P}{\partial q_2} \\\
\cdot \\\
\cdot
\end{array}\right]
\end{aligned}$$
---
## Contributers







