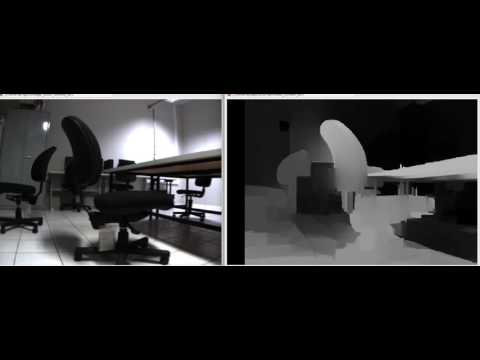
StereoMagic A Ros package for real-time stereo depth map and pointcloud generation. Mobile Robot Real Time Stereo Matching Video : (click to open) Disparity Image and PointCloud Generation: Quick Example(no camera needed! uses sample images): $ roslaunch roslaunch stereo stereo_sim.launch (please, change the GLOBAL_PATH variable in rectify.py and camera_simulator.py to the path of your workspace) Use it on Your Own camera feed: $ rosrun stereo stereo_node rqt_graph vis: Dependences: ROS (tested with kinetic) opencv 3.1 with contrib modules PCL 1.7 (comes with ROS kinect full-desktop-install) Hardware used in tests: Pioneer P3-DX (for moving shoots and video recording) PointGrey Bumblebee2 Camera Dell Precision Workstation TODO: improve rectify node using c++ and better calibration routine Ricardo Achilles Filho rachillesf@gmail.com