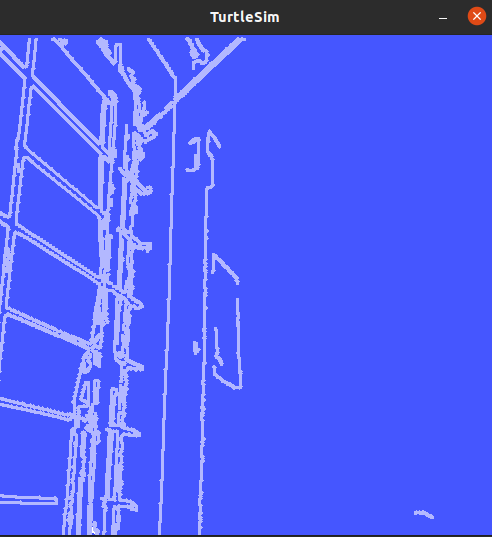
- In this project, the image on the left is taken as input and the image on the right is obtained as output by using turtlesim

-
The image on the left can be selected using it's path as well as can be directly taken from the camera
-
The below videos show the project in action
Click on the below animations for full video
Following are the concepts used for this project:
- Dynamic reconfigure
- To import the image using path
- To import the image using camera
- To set thresholds for Canny edge detection
- ROS parameters
- To set the values of threshold parameters
- To fetch the values of threshold parameters
- ROS services
- To spawn the turtles
- To teleport the turtle
- To set the status of a pen as - ON/OFF
- To remove the turtles after sketch is completed
- OpenCV
- To import image
- To find the edges using Canny edge detection
- To find the contours
- Multi-processing
- To spawn an army of turtles to draw the sketch
-
The directory contains 3 packages:
sketchdynamic reconfigureimage_thresholding
-
Sketch directory structure
├── CMakeLists.txt ├── docs # Supported files for documentation │ ├── Contours.png │ ├── done.png │ ├── dynamic reconfigure.png │ ├── edges.png │ ├── Output.png │ ├── rosgraph.png │ ├── test.png │ └── turtles.png ├── include │ └── sketch ├── launch # Launch Files │ └── sketcher.launch ├── package.xml ├── README.md ├── nodes # ROS Nodes │ ├── ironman.jpeg │ ├── sketcher.py │ └── Turtle.py └── TODO.md # TO DO for next version -
Image_thresholding directory structure
. ├── cfg # Configuration file for GUI │ ├── import.cfg # GUI params related to image import │ └── thresholds.cfg # GUI params related to image thresholding ├── CMakeLists.txt ├── include │ └── dynamic_parameters ├── launch # Launch files │ └── canny_thresholding.launch # Launch - GUI for Canny edge detection ├── nodes # ROS Nodes │ ├── get_values.py │ ├── import_server.py # Import Image import parameters in python node │ └── server.py # Import thresholding parameters in python node └── package.xml
dynamic reconfigurepackageOpenCV
To run the project on your local system, follow the procedure:
-
Download the packages -
sketch,image_thresholding, anddynamic-reconfigure-noetic-devel -
Copy these packages to your ROS workspace i.e.
~/ROS_ws/src/ -
Build the workspace
$ cd ~/ROS_ws/$ catkin_make
-
Open new terminal and source the ROS workspace -
source ~/ROS_ws/devel/setup.bash -
Run the command -
$ roslaunch sketch sketcher.launch -
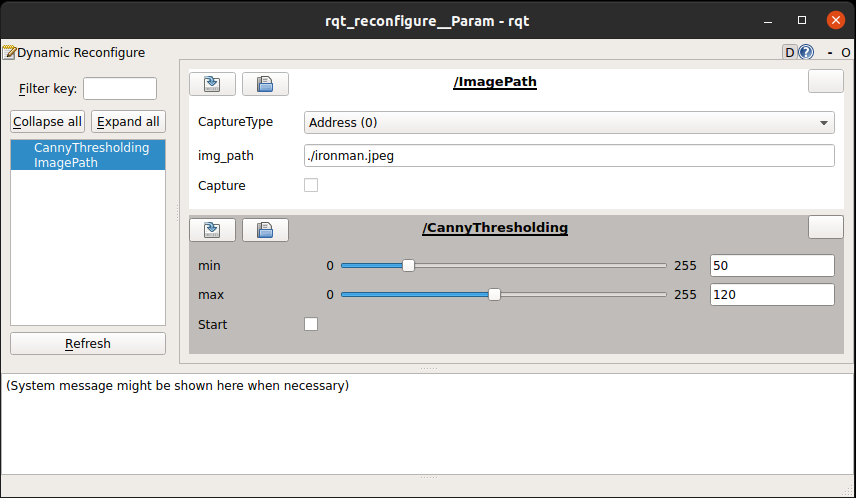
This command will open turtlesim and GUI for this project
-
You can select image Address (0) or Camera (1) option for
CaptureType -
If you select Address (0), insert the path of the image on you system in the
img_pathsection -
Then click on the checkbox in front of
Capture -
If you select Camera (0), camera window will pop-up and you can click on the checkbox in front of
Captureonce you get the desired frame -
This will open up a window with edges in the selected frame
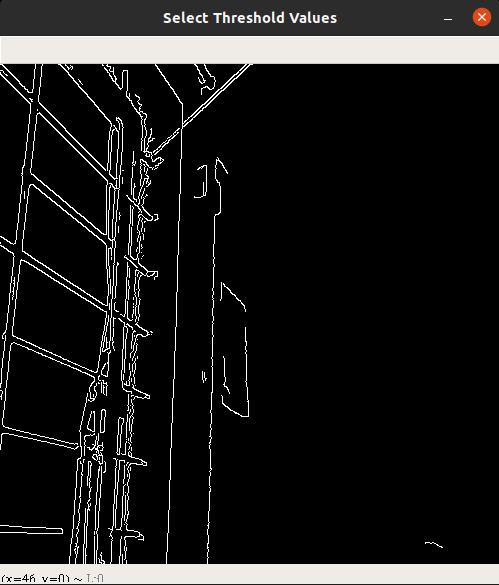
-
Now, use the GUI to set minimum and maximum threshold values to get the desired contours
-
Click on the checkbox in front of
Startto spawn an army of turtles which will sketch these contours for you
-
After the sketch is completed, the turtles will disappear





Note:
- If you want to change the approach to sequential from parallel, follow the steps:
- Open launch file in this directory
~/ROS_ws/sketch/launch/ - The
argtag for the sketcher node has a value of 1 - Change this value to
0
- Open launch file in this directory
- Here, 0 = sequential execution and 1 = parallel execution

![]()
![]()
![]()