INF: Implicit Neural Fusion for LiDAR and Camera
Project Page | Video | Paper | Data

Dependencies
You need to first install CUDA and the correspoinding PyTorch following PyTorch documentation.
We used cuda 11.7 and PyTorch 2.0.0 in our experiments.
Installation
The necessaray libraries are in requirements.txt. Note that PyTorch is not included in requirements.txt. you need to install PyTorch by yourself in advance. Install requirements.txt by
python3 -m pip install -r requirements.txtData
Data is only for academic use. Agree and download here.
Structure:
Images are saved in images folder, while LiDAR scans are saved in scans folder.
├───data/
│ ├───indoor1/
│ │ ├───images/
│ │ ├───scans/
│ │ ├───camera_mask.png
│ │ ├───ref_ext.json
│ │ ├───poses.npy
│ │ └───lidar_mask.png
│ └───indoor2/
│ ├───images/
│ └───scans/
-
Put the data under data folder. You can use the following code:
mv inf_data.zip <your_working_directory>/data/inf_data.zip cd <your_working_directory>/data unzip inf_data.zip rm inf_data.zip
-
The file names of images and LiDAR scans are in order. The file name of nth camera image is hard coded as
f"{id:04}.jpg"in data/base.py. The file name of the nth LiDAR scan is hard coded asf"{id:04}.npy"in data/ouster. -
Other files that are not mandatory:
- poses.npy: known poses of LiDAR scans with shape of (-1, 3, 4) or (-1, 4, 4). Required if you want to evaluate the estimated poses or train the neural density field with known poses. The way to read the pose file is defined in data/base.py
- ref_ext.json: the reference LiDAR-camera extrinsic parameters. Required if you want to evaluate estimated extrinsic parameters. The way to read json file is defined in model/color.py. Note this is the extrinsic parameters to project LiDAR points to camera space. Inside json it should be like
"rotation": [-1.0405687 , -3.93209467, 5.79554194], "translation": [-0.004058155231177807, -0.02666468918323517, -0.19954881072044373]
- lidar_mask.png: mask for LiDAR scans. Required if you want to mask some areas of the LIDAR frames. The projection should be consistent to LiDAR projection functions. The way to read mask in defined in data/base.py.
- camera_mask.png: mask for camera scans. Required if you want to mask some areas of the camera frames. The way to read mask in defined in data/base.py.
Execution
In our project, the process of density field training and camera-LiDAR calibration are separated.
Option files are saved in options/. Detail explanations for the options are written in base options in options/bases.
Note that yaml and model attributes must be specified in command lines.
Density Field
To train density field with estimating poses:
python3 main.py --model=density --yaml=density_poses_indoor1To train density field with known poses:
python3 main.py --model=density --yaml=density_known_indoor1Color Field
You need to specify the name used for density field training in density_name tag.
python3 main.py --model=color --yaml=color_indoor1 --density_name=densityResults
Results will be in output/{group}/{name}
Options
The options are explained in the option files in options/bases/.
- base.yaml includes the options common in both density field and color field trainings.
- base_density.yaml includes the options required for training density field with known LiDAR poses.
- base_density_poses.yaml includes the options required for training density field and LiDAR poses.
- base_color.yaml includes the options required for training color field and LiDAR-camera extrinsic parameters.
Additionally, we emphasize the following options here.
- Range of scene(Required for training Density Field). It is used to normalize the points for positional encoding. You need to provide a rough range of the scene so that the points in the scene can be normalized to (0, 1).
--train.range=60 - The threshold distance of movements for a local map(Required for LiDAR pose estimation). If a frame is certain distance away from the most recent keyframe, we consider this frame as keyframe. This distance is defined in:
--train.distance=2 - Maximum depth for rendered depth map(Required in all cases). The depths rendered will be mapped to color map ranging from 0 to this maximum depth.
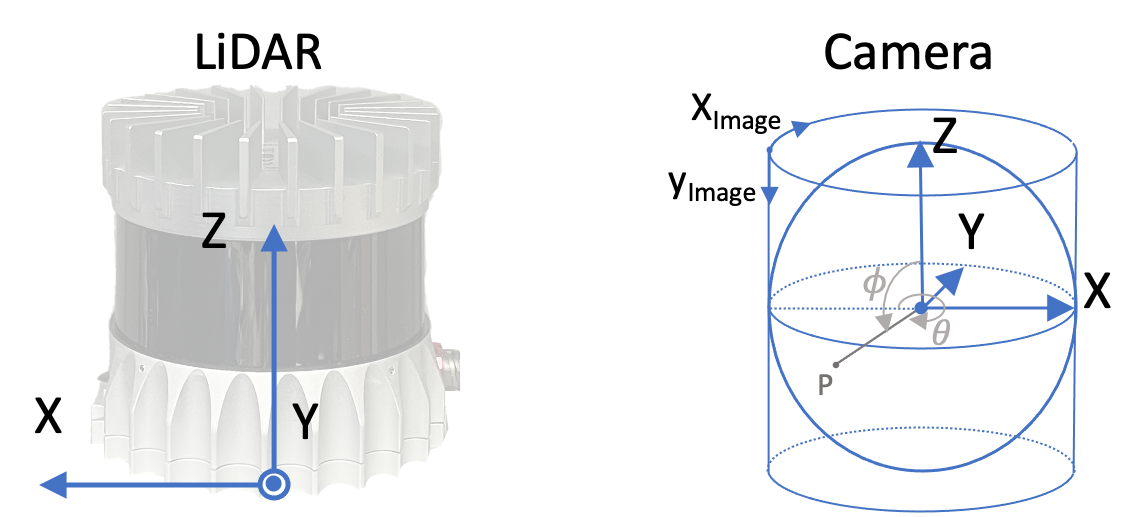
--render.depth=30 - Initial value for extrinsic parameters for faster convergence(Optionaly for LiDAR-camera calibration). This should be the LiDAR-to-camera transformation. The first three number should be the rotation represented with xyz-order euler angles in degrees. The last three number should be the translation in xyz order in meters.
The coordinate used in our program is shown as this:
--extrinsic=[0,0,0,0,0,0]

Citation
@inproceedings{zhou2023inf,
author = {Shuyi, Zhou and Shuxiang, Xie and Ryoichi, Ishikawa and Ken, Sakurada and Masaki, Onishi and Takeshi, Oishi},
title = {INF: Implicit Neural Fusion for LiDAR and Camera},
journal = {IROS},
year = {2023}
}Acknowledgements
The code is accessible under the BSD license and based on codes from BARF, which is governed by the MIT license. The projection function of panorama camera follows that in LiDAR and Camera Calibration using Motion Estimated by Sensor Fusion Odometry under MIT license. You can locate the licenses within the licenses/ directory.