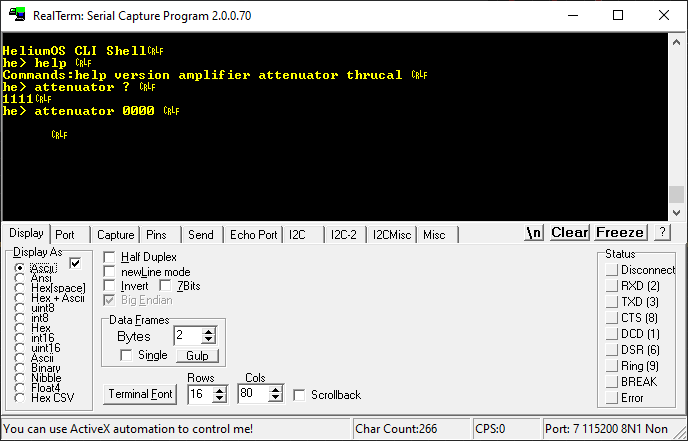
- Automatic baud rate support
- Automatic generation of help functions
- Support for errors and function arguments
- Protection against incorrect commands
- Adds USB support in the MCU and sets it as a virtual port in middleware section.
- Changing buffer size APP_RX_DATA_SIZE to 40 characters in usbd_cdc.if.h file.
- Add code in CDC_Control_FS function in CDC_SET_CONTROL_LINE_STATE switch case in usbd_cdc.if.c file.
/*SYSTEM INTERRUPT TO CHECK IF THE COM PORT HAS BEEN OPENED*/ USBD_SetupReqTypedef * req = (USBD_SetupReqTypedef *)pbuf; if(req->wValue &0x0001 != 0) hostComOpen = 1; else hostComOpen = 0;
- Add code in CDC_Receive_FS function after USBD_CDC_ReceivePacket function and before return (USBD_OK) in usbd_cdc.if.c file.
/*SYSTEM INTERRUPT TO RECEIVED DATA*/ extern uint8_t receivedData[40]; extern uint8_t receivedDataFlag; memset(receivedData, 0, sizeof(receivedData)); strlcpy((char*) receivedData, (char*) Buf, (*Len) + 1); receivedDataFlag = 1;
- In USER CODE BEGIN Includes in file main.c add #include "heliumOS.h"
- In USER CODE BEGIN 2 in file main.c add helium_init();"
- In main loop in file main.c add helium_mainLoop();"
- At this point you can start creating a new tasks!
- Change number of tasks by editing the taskNumbers variable in heliumOS.h
- In the section for new tasks in the heliumOS.h file we add a new function in the format: void helium_task_X(char * args); where X is the task number.
- In helium_init function in the heliumOS.c file just write data in structure just as in example task.
- In helium_parseCommand function in the heliumOS.c file add a new task to switch block.