First version of this zeppelin should be able to keep itself up in the sky for a decent amount of time. It will be controled remotely (probably via iphone). Total length of airship 168.13cm. Volume 0.46 m3.
In the end it should look like this:
- Calculate the overall size, mass, and lifting force of the aerostat
- Create patterns for aerostat
- Create electrical schemas
- Design software architecture
- Create and debug airship's software
- Create software for controlling unit
- Trace PCBs and make all PCBs
- Assemble aerostat
- Field tests
Here is the link to spreadsheet with calculation I made for the lifting force and mass of the airship
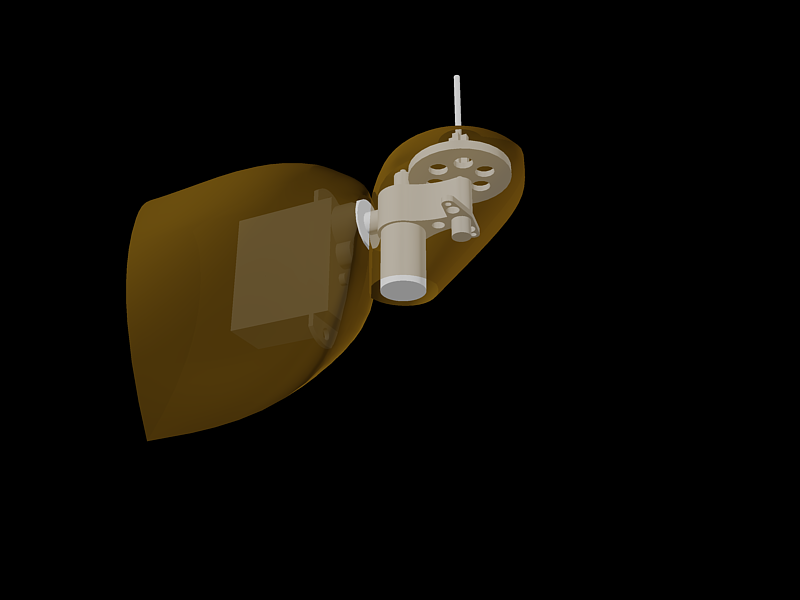
Most parts used here were thoroughly measured and calculated. Like these cases for motors and servos (feather module)
Well there's not much to say about schematics despite the fact that I'm using ST microcontroller stm32l011f4 and transmitting modules nRF24013. It is designed and traced with EAGLE.
I am using smt32l011 and the IDE is VS Code. The language is C with HAL library.
- Feather MCU should use internal PWM channels directly. This will simplify code and increase working frequency.
- Feather should use a motor driver that does not short circuit when in low phase of the PWM.
- Consider using 8 bit controller for the Feather module.
- Second version will be able to carry a camera.
- Third version will automatically keep position, folow the route or target.