
Based on the numpy and open3d(0.8.0) in python3.7, we deploy the morphing betas and poses of SMPL, SMAL and MANO. This repo can help you learn and debug these models more efficiently.
| Name | Usage |
|---|---|
| dB01 | load rest model from the .pkl, and observe the beta para. |
| dB02 | load typical poses from .pkl, and observe the pose para. |
| dB03 | update the MANO(pure hand) support. |
| dB04 | update the SMPL with Hand support. |
Here are the illustrations of the 4 demos. demo1 and demo2 are developed for both SMPL and SMAL, demo3 is for MANO, and demo4 for SMPLwMANO.
-
Demo1: dB01_LoadShape.py
View how the first 3 beta[:3] parameters identify the person and animal. Notice that when increasing beta[0] , the female become taller while the male become shorter.

-
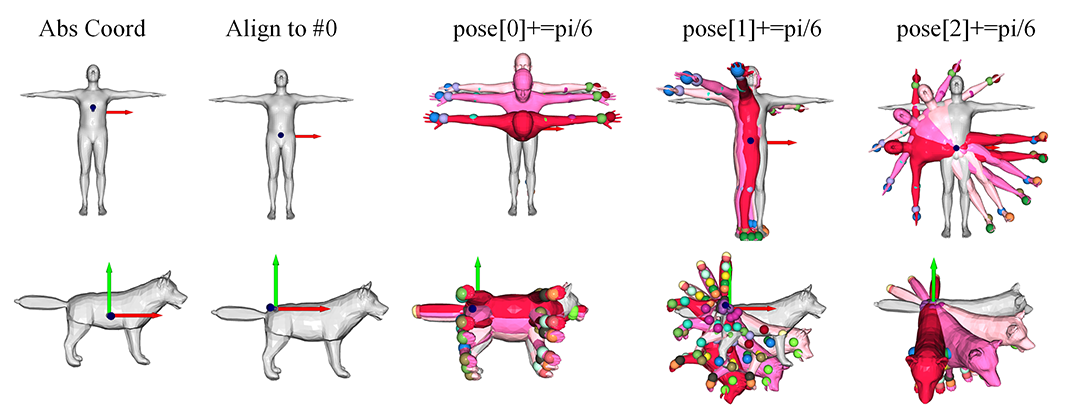
Demo2: dB02_TypicalPose.py
View how the first 3 pose[:3] parameters(in 1-D scope) influence the model. They all control the whole body to rotate w.r.t. point J[0], called " root orientation".
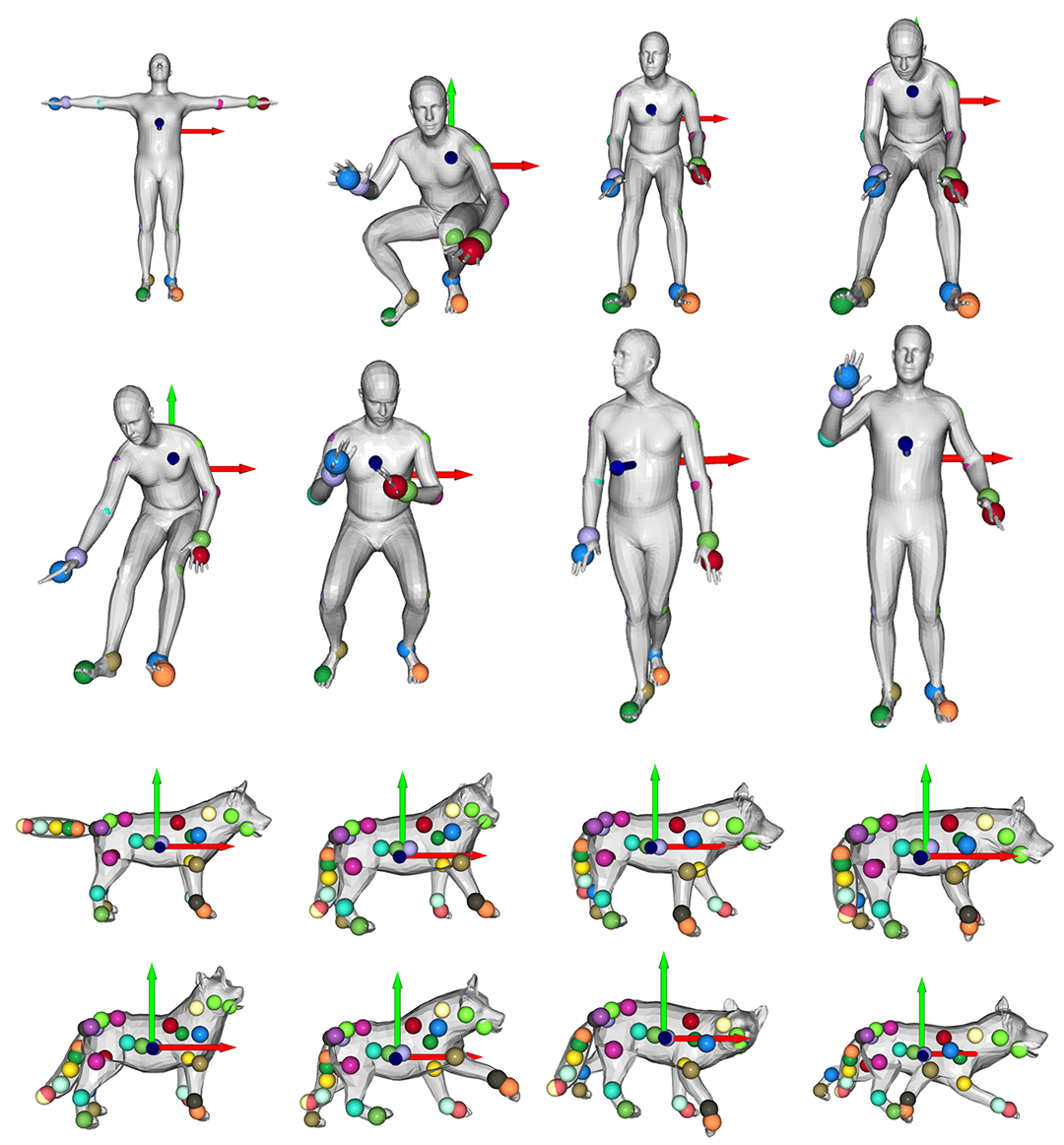
 For the combined influence of the rest parameters in pose[3:] cannot be controlled easily, we directly load the pose[3:] from the .pkl and can clearly distinguish different poses as following:
For the combined influence of the rest parameters in pose[3:] cannot be controlled easily, we directly load the pose[3:] from the .pkl and can clearly distinguish different poses as following:
-
Demo3: dB03_Control_pureHand.py
Add MANO controller to manipulate the hand only. Two hands in different pose:
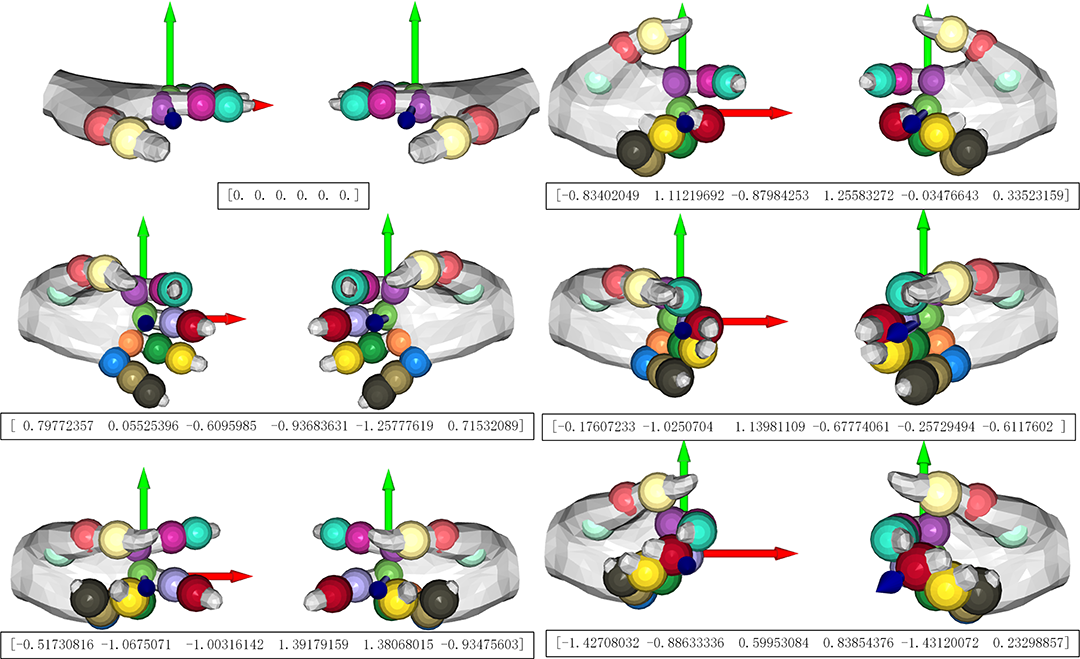
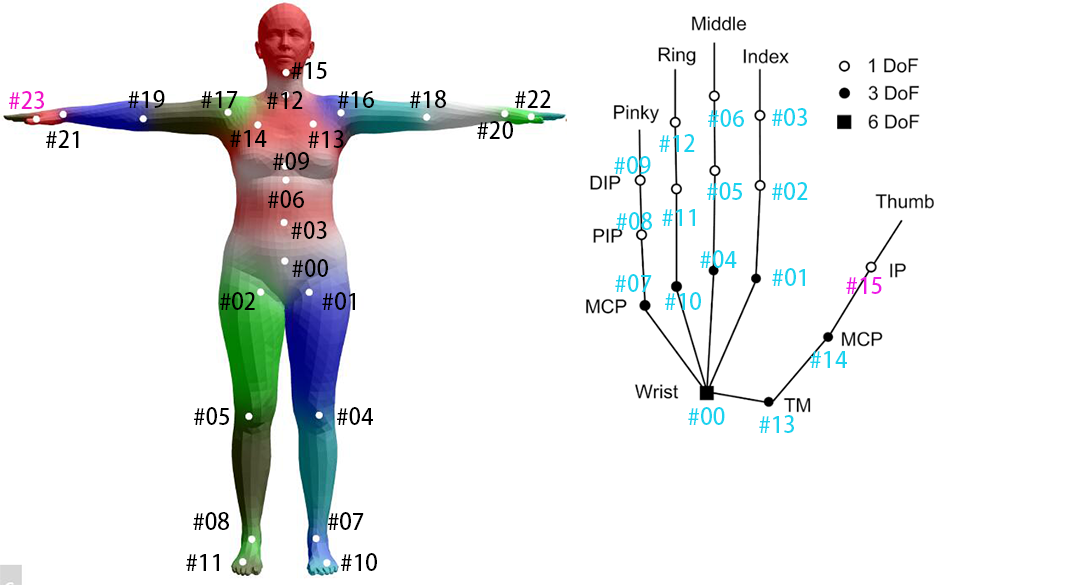
Pose control for MANO is a little different from the former two models. For a MANO hand, there are totally 15 joints. According to common sense, the pose should have array_shape in (16 x 3). In MANO, its first 3 pose_coeff is the same as SMPL; but the last 45 pose parameter controlled in a PCA-like way. There is a params['hands_components'] with array_shape (45,15 x 3) in template .pkl, which contains 45 principle components(PC) for last 45 pose parameters. So the post of the last 45 bits can be obtained by multiplying each PC by a scalar weight and summing together. The corresponding scalar weight is called pose_coeff. Finally, pose_coeff[] contains the following definition:
- pose_coeff[:3] for global rotation (pi) ;
- pose_coeff[(3+x):x]for PC scalar weight(almost 45);
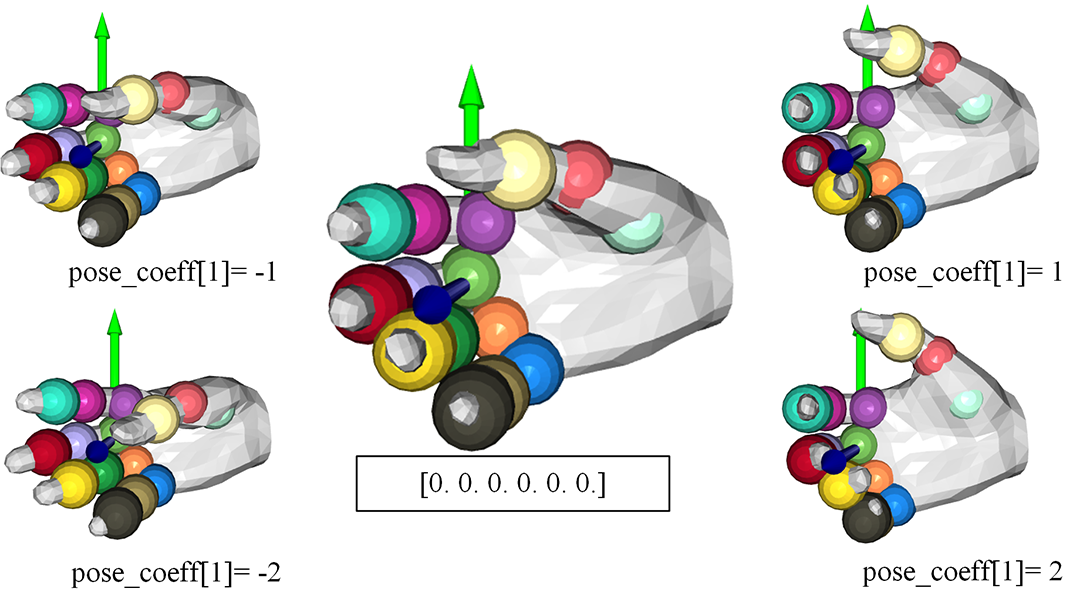
The pose_coeff[3] effect:
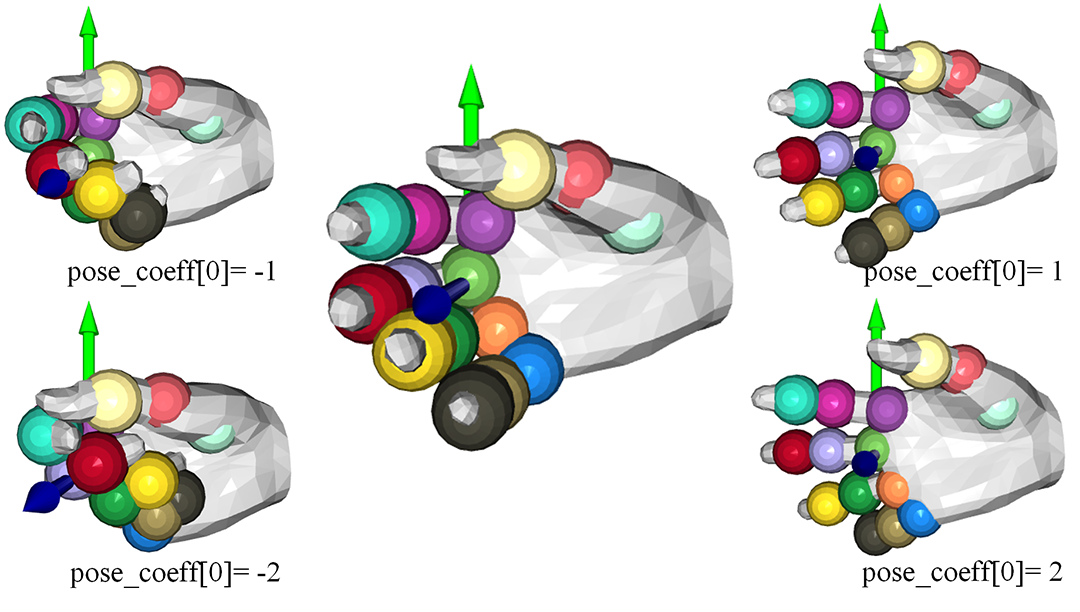 The pose_coeff[4] effect:
The pose_coeff[4] effect:
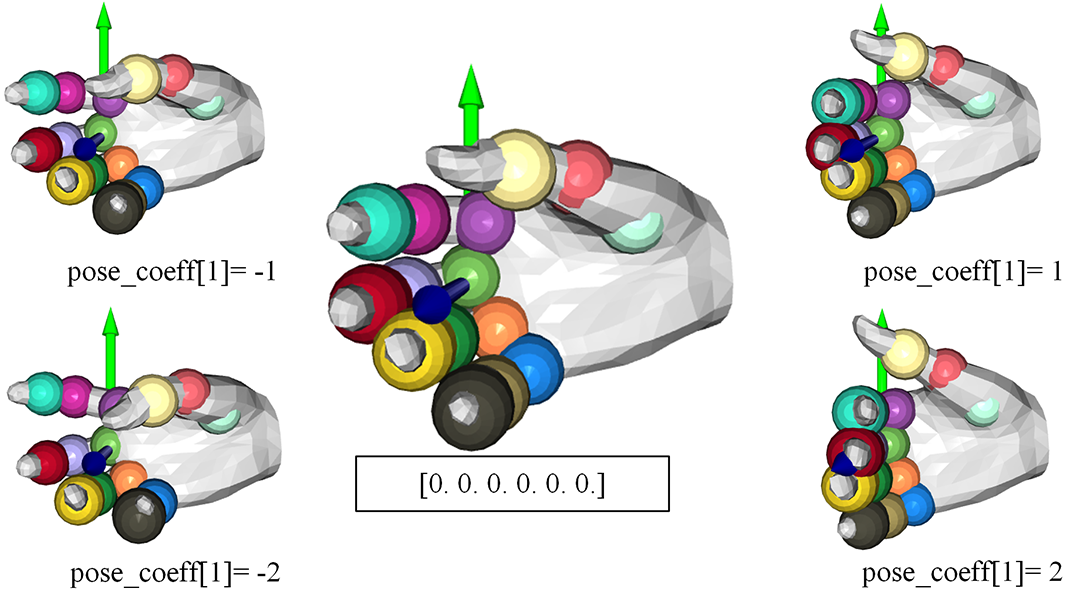
 The pose_coeff[5] effect:
The pose_coeff[5] effect:
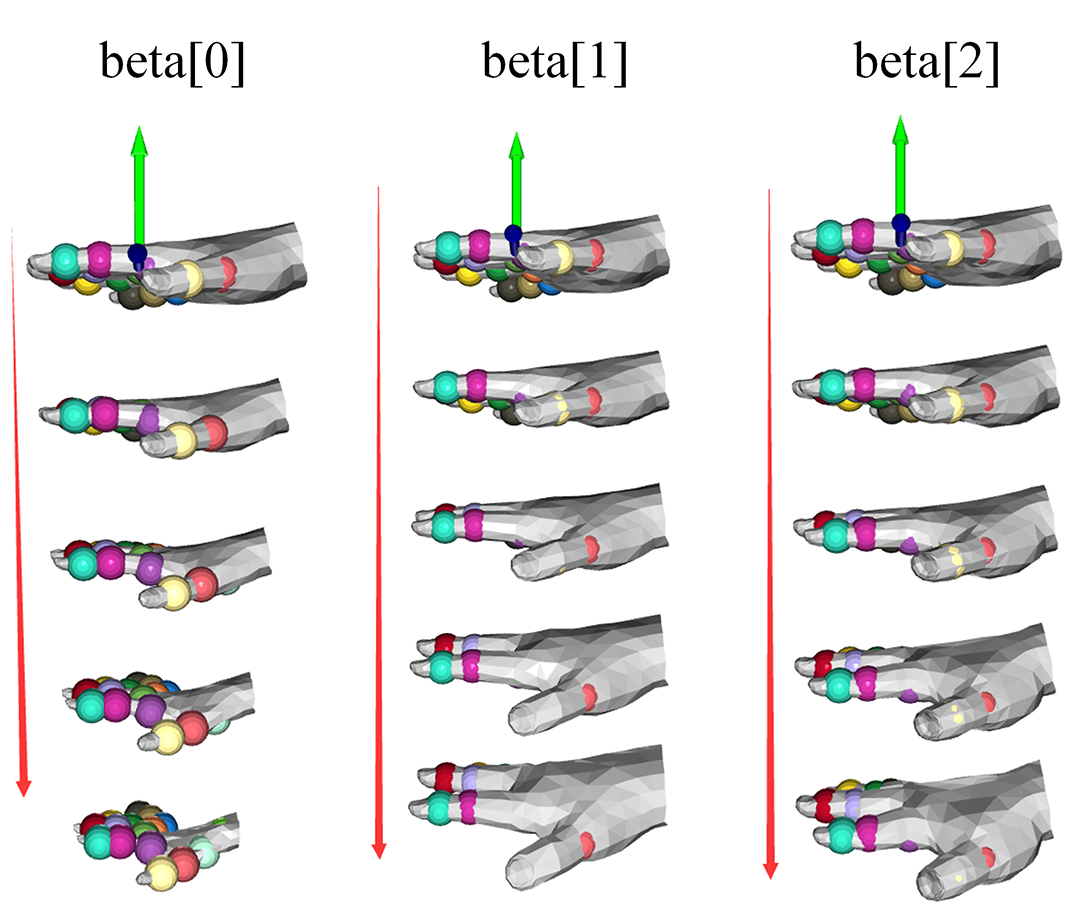
 Fist 3 beta (shape) effect:
Fist 3 beta (shape) effect:
-
Demo4: dB04_Control_SMPL+H.py
For the MANO use the hand in SMPL(same vertex and faces topology), so these 2 model can be combined to produce richer applications.
The combined model load the full topology from the weight file from 'SMPLH_x.pkl', and load the PC of hand from the MANO pkl. This model use the first 21+1 pose joints in SMPL(SMPL has 23, del the final two joints of wrist), 15 joints of left and right hands respectively.
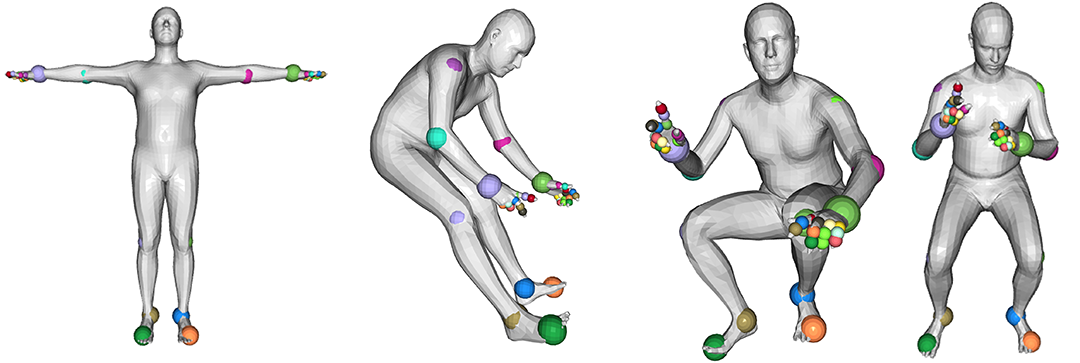 So its final pose array_shape is (52 x 3). In pose control:
So its final pose array_shape is (52 x 3). In pose control:- the body part(22 x 3) is set in a SMPL way;
- the two hand parts(15 x 3) are set in a PC way.









| Folder Name | Usage |
|---|---|
| com_utils | the utilities based on open3d |
| smpl_utils | the class definition of SMPL(also for SMAL) |
| template_pkl | the parameters of rest shapes(diff identity) and typical poses(diff posed) |
Environment: python3.7;
Dependency:
- numpy;
- chumpy; (only for read old .pkl data format)
- open3d; (Visualization & 3D Operation);
To create the environment, you can:
conda create -n smpl37 python=3.7
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
(Nevertheless, chumpy is also needed for some original pikle loading process for Shape blendshapes (params['shapedirs'] in the code), but we don't use it when computing. )
Thanks for the help provided by Ren et al. in VCL, specifically in model discussing and template providing.