- Final project
Hi all,
Congratulations on getting into the most interesting part of this course! You could use what you have learnt in class to complete a real robot manipulation task, and this is also the chance to check whether you have understand those knowledge. Maybe you'll be interested in robotics through this practical project, then welcome to join us and do something that changes the world! So why still hesitate? Take action now!
Junjia Liu
-
2021.11.22 - Some students told me that they do not have a computer with a Nvidia GPU. So, I tried to remove Nvidia's dependence from the docker file. However, I found that the Pybullet simulator is mainly rely on the OpenGL, which has to require a Nvidia driver.
-
2021.11.22 - If you have any question about this project, please try to learn and use the
issuesin Github to ask your questions so that I can reply in time and let other students who encounter the same problem know the solution at the same time.
-
2021.12.03 - According to the reactions of some students, the coordinates calculated according to the DH matrix differ from the
get_fkresult I gave. There has always been a difference of0.42on the x-axis. This is caused by the definition difference of the world coordinate system. In this task, the world coordinate system is defined as the center of the desktop. Thus, you can simply fix it by adding0.42on the x-axis of the coordinates you calculated according to the DH matrix.

Notice: If you are familiar with git, Github, Docker, Linux, virtual machine, you can skip this chapter and start from the second chapter Set up your Environment.
Step 1: Since this project requires Docker and Ubuntu environment, and if you are just using a Windows PC, I highly recommend you install a virtual machine in your Windows as your first step. The virtual machine I recommend is vmware.
Notice: You need to give a large space to the virtual machine (> 30G), otherwise the space will not enough for pulling the docker image.
Step 2: After installing your virtual machine, please follow this video to install a Ubuntu 18.04 on VMware in your Windows.
Cheers! You have your first Linux system!
In Ubuntu, the only thing you need to know is how to use the Terminal. Everything can be done by several terminal commands.
Step 3: Here is a command tutorial for beginners, you can take a quick look and understand the basic usage methods.
Notice: From here, forget about your Windows, everything is in Ubuntu!
Since this project contains large amount of dependent packages and various unexpected errors may occur during your installation and use, it is convenient for us to use Github to host our code. There are two advantages:
- I can modify the bug you faced and re-push (upload) the correct version of code rapidly;
- You can re-pull (download & update) the modification in the correct version easily, rather than the whole code repository again and again.
Step4: Here I highly recommend to use the GitKraken to clone (initial download) the project repository in your Ubuntu system and keep tracking the version changes.
Or simple git command is also recommended. Here is a tutorial.
Cheers! You're doing the same cool things as a programmer.
Step5: Get familiar with Docker [ English | Chinese ].
In order for your solution to be executable on your local machine, I provide you a docker image with some pre-installed software. You need to develop and test your solution within this docker image.
Step6: So first you need to install the following requirements for using Docker.
- The software package must run on a computer with a NVIDIA GPU.
- Proper NVIDIA driver must be installed (https://phoenixnap.com/kb/install-nvidia-drivers-ubuntu)
- Docker must be installed (https://docs.docker.com/engine/install/ubuntu/)
- NVIDIA container runtime must be installed (https://www.celantur.com/blog/run-cuda-in-docker-on-linux/)
- Ubuntu 18.04 and Ubuntu 20.04 are tested and recommended, other Linux distribution may also work.
There are some submodules in the software package, and you need to clone the repository recursively.
Step7: Clone the project repository using the Terminal.
git clone https://github.com/Skylark0924/advanced_robotics_project.git --recursive
or
git clone https://github.com/OCRTOC/OCRTOC_software_package
cd OCRTOC_software_package
git submodule update --init --recursive
Step8: Pull the Docker image or build it from docker file.
Notice: This will take really a long time (about 1~3 hours), so you can leave the virtual machine alone (but not shutdown it) and do something else.
-
Option 1 (suggested, faster): Build docker image from docker file:
# Jump to the path you clone the project repository cd [YOUR_REPO_PATH] cd docker bash build.sh ocrtoc_pb_g:v1
Step9: I provide two scripts for creating and executing the docker image. Please modify the name and path in the scripts according to your own needs.
# Jump to the path you clone the project repository
cd [YOUR_REPO_PATH]
# Create docker container
bash tools/create_container.sh
# Enter the docker container
bash tools/exec_container.sh
When your host operating system restarts, the docker will not restart automatically. I also provide another script for you to restart the docker.
# Restart docker container
bash tools/start_container.sh
# Enter the docker container
bash tools/exec_container.sh
Step10: Since some parts of the environment are given as source code, they cannot be installed while building the docker image. You need to run the following commands to set up the environment. However, you don't need to run them when you restart the docker container.
# Enter the docker container
bash tools/exec_container.sh
## In the docker image
cd /root/ocrtoc_ws/src/tools
bash setup_env.sh
Content of the Docker Image
- Operating System: Ubuntu 18.04
- ROS melodic-desktop-full
- moveit 1.0.7
- CUDA 11.2
- PyBullet 3.0
- ceres-solver 2.0
- colmap 3.7
- pycolmap 0.0.1
- torch==1.8.2, torchvision==0.7.0, open3d==0.12.0 for python3 and open3d==0.9.0 for python
Now you have finished setting up the environment, and you can try to run the baseline solution.
Cheers! By now you have completed all the installation steps, let's enjoy the exploration!
Step11: Open it! Open 3 terminals and execute the following commands in each of the terminal.
# In the first terminal, run the following to open the docker image
bash tools/exec_container.sh
# In the docker image
# Start the PyBullet simulator and ros interface
roslaunch ocrtoc_task bringup_simulator_pybullet.launch task_index:=0-0
# In the second terminal
bash tools/exec_container.sh
# In the docker image
# Start moveit and rviz
roslaunch panda_moveit_config ocrtoc.launch
# In the third terminal
bash tools/exec_container.sh
# In the docker image
# Start manipulator interface node
rosrun ocrtoc_common manipulator_interface_node.py
You may find a motion planning plugins is shown in the rviz, which is a motion planning framework called MoveIt. This framework is usually used in the daily robotics research, since it contains many mature robotics algorithms such as ... and allows us to execute the robot motion without disturbed by trivia. Here is the manual of the MoveIt, you can take a look but do not waste too much time: http://docs.ros.org/en/kinetic/api/moveit_tutorials/html/doc/quickstart_in_rviz/quickstart_in_rviz_tutorial.html
However, in this project, we expect you can practice what you have learned in this course, rather than using some open source packages.
In this project, you are required to implement a kinematic control on a 7-DOF Franka Panda robot to track a desired trajectory.
Demo

The Denavit–Hartenberg parameters of this robot are given as follows:


Though there are a mass of scripts in this project, the only one you need to consider and modify is ocrtoc_common/test/trajectory_tracking.py.
# Jump to the path of your solution
roscd ocrtoc_common/test
# Plot the desired traj in rviz (python2)
python test_dsr_traj_vis.py
# Run your solution (python3)
python3 trajectory_tracking.py
Notice: Every time you try to test your code, please make sure the three terminals mentioned in the Step11 is running normally! Otherwise, you will receive a plenty of errors.
- (20%) Finish the forward kinematic function
def fk(self, q); - (20%) Finish the Jacobian function
def jacobian(self, q); - (55%) Finish the kinematic control function `def control(self);
- (5%) Plot your results as I mentioned in the
def traj_vis(self); - Bonus (+10%) Take your code and come to Academic Building 1 (2F) to test your code on the real Panda robot.
Please submit your trajectory_tracking.py and a document which contains your result figures. The deadline is behind the final exam.
-
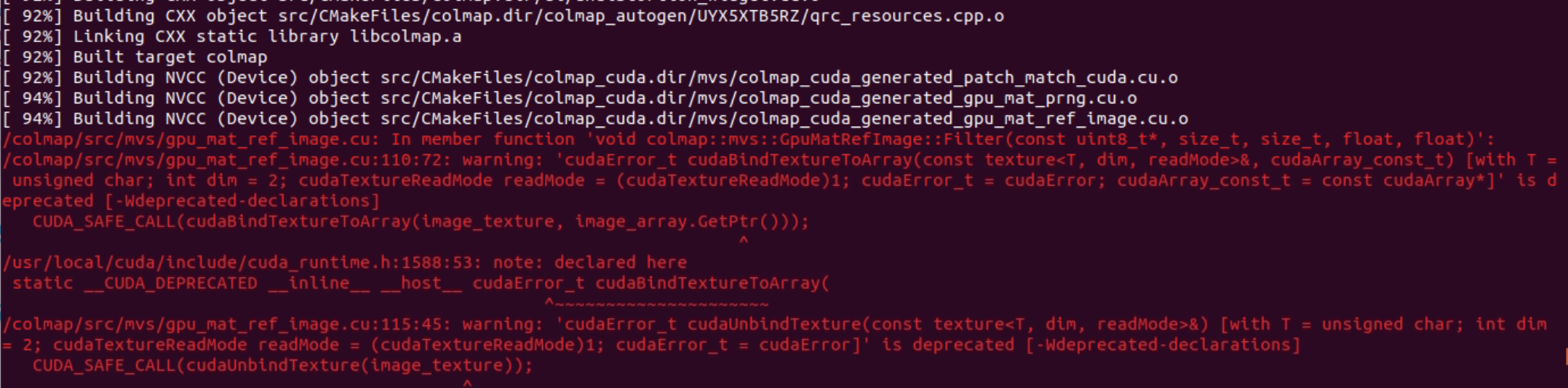
If you are using the recommended installation and your terminal is stuck here, don't be panic, it just takes a while.
-
If you cannot find anything in
\root\ocrtoc_ws\src, it probably be the mistake intools\create_container.sh. You need to modify the name and path in the scripts according to your own needs.So you need to modify
$HOME/OCRTOC_software_package:/root/ocrtoc_ws/src-><your absolute path of the OCRTOC_Software_package directory>:/root/ocrtoc_ws/src. (See Skylark0924#2 (comment) for detail) -
When you run
rosrun ocrtoc_common manipulator_interface_node.pyand get an error like this:Traceback (most recent call last): File "/root/ocrtoc_ws/src/ocrtoc_common/scripts/manipulator_interface_node.py", line 8, in <module> m_i = ManipulatorInterface('panda_arm') File "/root/ocrtoc_ws/src/ocrtoc_common/src/ocrtoc_common/manipulator_interface.py", line 25, in __init__ self.move_group = moveit_commander.MoveGroupCommander(group_name) File "/opt/ros/melodic/lib/python2.7/dist-packages/moveit_commander/move_group.py", line 66, in __init__ name, robot_description, ns, wait_for_servers RuntimeErrorshutdown request: [/manipulator_interface_node] Reason: new node registered with same name : Unable to connect to move_group action server 'move_group' within allotted time (5s)please try to exit the docker and get in again.
# In the docker image exit # Out of the docker cd [YOUR_REPO_PATH] bash tools/exec_container.sh

You must believe that some bugs can be fixed by just reboot the system. So, how can you reboot the Docker?
# In the docker image
exit
# Out of the docker
docker ps -a
## It will output a list of containers, find the one the 'IMAGE' is 'ocrtoc_pb_g:v1' and copy its 'CONTAINER ID'
docker stop [CONTAINER_ID_YOU_COPY]
# Out of the docker
cd [YOUR_REPO_PATH]
bash tools/start_container.sh
bash tools/exec_container.sh
If there are some issues in this repository, I will fix it and notify you via email. You don not need to execute Step1~Step10 again, the only two things you need to do is to pull the modification and execute Step10 to renew your environment.
# In your repo path
git pull # you might face a merge alert, handle it yourself
# Enter the docker container
bash tools/exec_container.sh
## In the docker image
cd /root/ocrtoc_ws/src/tools
bash setup_env.sh