CIA-SSD-AI-TRT(CIA-SSD ALL IN TensorRT,NMS not implemented in TensorRT,implemented in c++)
CIA-SSD consists of six parts:
- preprocess: generate voxel, it is implemented in voxelGenerator.cu,it is a TensorRT plugin
- 3D backbone: 3D backbone include 3D sparse Convolution and 3D Submanifold Convolution. sparseConv3dlayer.cu is a TensorRT plugin for 3D sparse Convolution, and submConv3dlayer.cu is a TensorRT plugin for 3D Submanifold Convolution.
- neck: this part is mainy implemented by TensorRT aip, because they are all general modules. the function of sparse2Dense.cu is from sparse tensor to dense tensor
- head: this part is mainy implemented by TensorRT aip.
- postprocess: it includes anchorGenerate and decoder, they are implemented by generateAnchorDecode.cu, it is also a plugin.
- 3D NMS: it comes from https://github.com/NVIDIA-AI-IOT/CUDA-PointPillars/blob/main/src/postprocess.cpp
- all config in params.h
- FP16/FP32 can be selected by USE_FP16 in params.h
- GPU id can be selected by DEVICE in params.h
- NMS thresh can be modified by NMS_THRESH in params.h
- build CIA-SSD-AI-TRT and run
firstly, install TensorRT,my environment is ubuntu 18.04, cuda 10.2,cudnn8.2.
I installed TensorRT with TensorRT-8.0.1.6.Linux.x86_64-gnu.cuda-10.2.cudnn8.2.tar.gz.
after that, modify CMakeLists.txt
include_directories(/home/xxx/softwares/nvidia/TensorRT-8.0.1.6/include)
link_directories(/home/xxx/softwares/nvidia/TensorRT-8.0.1.6/lib)
Change these two lines to your own path
cd CIA-SSD-AI-TRT
mkdir build
cd build
cmake ..
make
sudo ./cia-ssd-ai-trt -s // serialize model to plan file i.e. 'cia-ssd-ai-trt.engine'
sudo ./cia-ssd-ai-trt -d // deserialize plan file and run inference, lidar points will be processed.
predicted outputs saved in CIA-SSD-AI-TRT/data/outputs folder
one frame takes about 1-2 seconds on my laptop with Intel(R) Core(TM) i5-7300HQ and NVIDIA GeForce GTX 1050 Mobile(1050ti), it is very slow, needs to be optimized in the future.
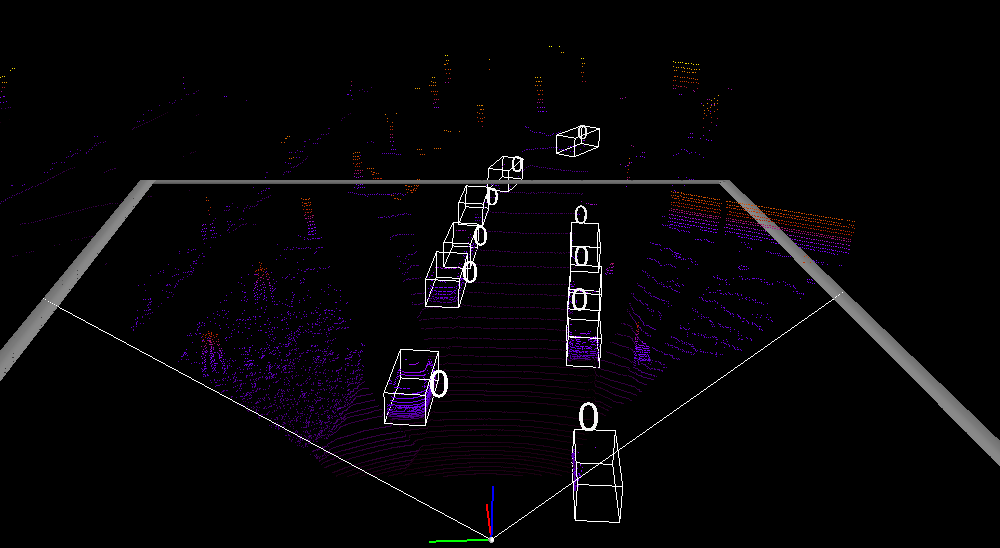
- show predicted 3D boxes in the lidar frame
fristly install anaconda.
then,
1 conda create -n pc_show python=3.6
2 conda activate pc_show
3 pip install vtk==8.1.2
4 pip install mayavi
5 pip install PyQt5
6 pip install opencv-python
cd tools
python show_box_in_points.py
if An error occurred like: qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "/home/xxx/anaconda3/envs/pc_show/lib/python3.6/site-packages/cv2/qt/plugins" even though it was found.
just delete it by run: sudo rm -rf /home/xxx/anaconda3/envs/pc_show/lib/python3.6/site-packages/cv2/qt/plugins
and try again
warning: do not close current Mayavi Scene window, type c in running terminal and press Enter,
it will show next lidar frame with predited 3d boxes in current Mayavi Scene window.

Reference code: