This repository provides a custom driver for the ADXL345 accelerometer, designed for seamless integration with the STM32 Nucleo-F446RE board. The driver is implemented as a modular set of source and header files, facilitating straightforward deployment and adaptation across various STM32 boards and microcontrollers.
- Efficient ADXL345 Driver 📡:Lightweight and optimized driver for the ADXL345 accelerometer, enabling reliable I2C communication.
- I2C Communication 🔄: Manages setup and data exchange with the ADXL345 using the I2C protocol.
- UART Data Transmission 📊: Reads acceleration data (
x_acc,y_acc,z_acc) from the ADXL345 and transmits it via UART for real-time monitoring or further processing. - Modular Architecture 🧩: Organized into separate source and header files for ease of integration into different projects or STM32 microcontrollers.
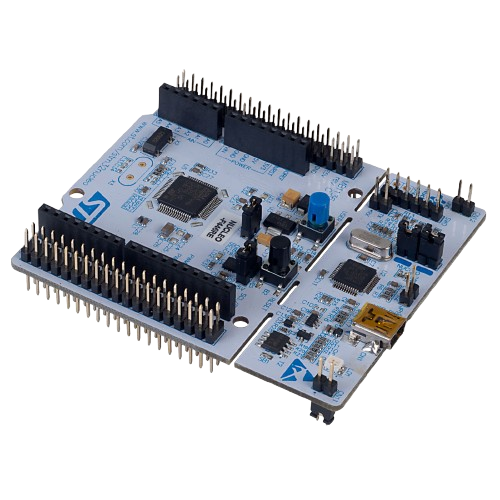
- STM32 Nucleo-F446RE: The target microcontroller board for this project.
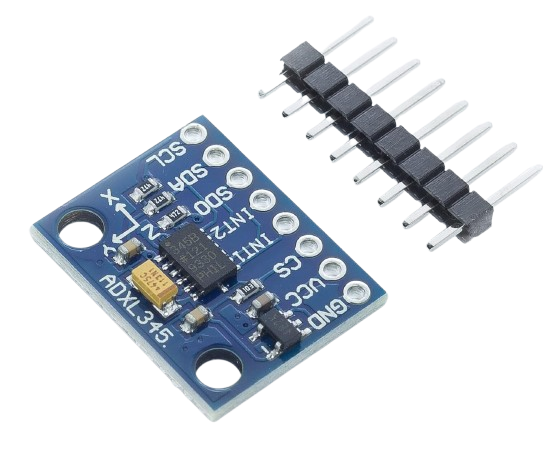
- ADXL345 Accelerometer: A 3-axis accelerometer with I2C communication.
- STM32CubeIDE: Recommended IDE for development and compilation.
- UART Interface: For monitoring or processing the accelerometer data on a connected device.



-
Connect the ADXL345 to the STM32 Nucleo-F446RE:
- VCC to 3.3V
- GND to GND
- SCL to I2C1_SCL (Pin PB8)
- SDA to I2C1_SDA (Pin PB9)
- INT1 and INT2 (Optional, for interrupt-driven operation) not utilized in this scope.
-
UART Connection:
- Tx (Pin PA2) to your UART receiving device.
- Rx (Pin PA3) to your UART receiving device.
- Download the core folder containing necessary files
- Open STM32CubeIDE and setup your MXConfigurations with I2C1 at pins PB8 & PB9 and make use of USART2 on the Asynchronous mode
- Include driver files in your project:
- Replace or adjust your
main.cfile as needed - Build and flash the project to the STM32 Nucleo-F446RE.
ADXL345.c: Contains implementation details for the ADXL345 driver functions.ADXL345.h: Defines function prototypes and constants.main.c: Hosts the application code responsible for reading acceleration data and transmitting it via UART.
- Initialize the I2C and UART peripherals in
main.c. - Configure the ADXL345 sensor and retrieve acceleration data using functions from
ADXL345.c. - Transmit acceleration data over UART for real-time monitoring.
#include "ADXL345.h"
// Initialize peripherals
MX_I2C1_Init();
MX_USART2_UART_Init();
// Initialize ADXL345
ADXL345_Init();
// Main loop
while (1) {
float x_acc, y_acc, z_acc;
// Read acceleration data
TT_GET_ACCELERATIONS();
// Send data over UART
printf("X: %f, Y: %f, Z: %f\n", x_acc, y_acc, z_acc);
HAL_Delay(500); // Adjust delay as needed
}📌 N.B.
Note that the ADXL345.c driver file includes two functions for obtaining acceleration data: one for basic data retrieval and another, used in main.c, that converts the data into a string buffer, preparing it for transmission over UART.