- Ubuntu 16.04
- Python 3.7.4
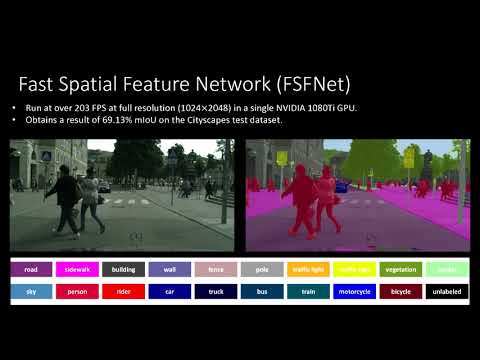
- NVIDIA 1080Ti GPU
- TensorRT
- Pytorch 1.1.0
- CUDA 10.1 and CuDNN v7.3
- Cityscapes dataset
- Additional Python packages: numpy, matplotlib, Pillow, torchvision and visdom
- Clone this files
cd FSFNet
git clone https://github.com/computervision8/FSFNet.git
- Install dependencies:
cd FSFNet
pip install requirements.txt
- Install PyCuda and TensorRT(v.5.1.5.0)
- Only Cityscapes dataset
# encoder-decoder architecture train
cd FSFNet/train
python main.py --savedir FSFNet --datadir /home/user/citysacpes/ --num-epochs 200 --batch-size 6
# only decoder
cd FSFNet/train
python main.py --decoder --savedir FSFNet --datadir /home/user/citysacpes/ --num-epochs 200 --batch-size 6
- pretrained using Imagenet
# pretrained imagenet
cd FSFNet/imagenet
python main.py /home/user/DB/ILSVRC2012
# decoder
cd FSFNet/train
python main.py --decoder --savedir FSFNet --datadir /home/user/citysacpes/ --num-epochs 200 --batch-size 6 --pretrained "../save/FSF_encoder_pretrained(save)/FSFNet_encoder_pretrained.pth.tar"
- Evaluation on Cityscapes test server
cd FSANet/eval
python eval_cityscapes_server.py
cd FSFNet/eval/save_results
zip test.zip ./*
# go to https://www.cityscapes-dataset.com/
# login cityscapes id
# go to https://www.cityscapes-dataset.com/login/
# submit FSFNet result zip file
- Test the inference speed
- TensorRT(v5.1.5) does not support bilinear interpolation so we used nearest neighbor interpolation instead of using bilinear interporlation. The gap between nearest neighbor interpolation and bilinear interpolation FPS measurements in Pytorch is only 5.2 FPS.
cd FSANet/eval/latency
python eval_forwardTime.py
- Accuracy evaluation using intersection-over union (IoU)
cd FSFNet/eval
python eval_iou_Cityscapes.py
python eval_iou_Camvid.py.py
- Real-world Evaluation
# 1. generates result images
cd FSANet/eval/
python eval_cityscapes_color.py
# 2. save result images
cd FSFNet/eval/save_color/
# 3. move result file to 2_result folder
cd FSFNet/realworld_sample_images/2_result/
# 4. run saveImageResult.py to combine original and result images
python saveImageResult.py
- NVIDIA Jetson TX2 Evaluation
# 1. install JetPack 3.0 on a NVIDIA Development Kit. JetPack can flash the Jetson TK2
# 2. install python3
sudo apt-get install cmake python3-pip
# 3. install pytorch
git clone -b v1.1.0 https://github.com/pytorch/pytorch
cd pytorch
git submodule update --init --recursive
time python3 setup.py install
sudo pip3 install -r requirements.txt
sudo python3 setup.py install
gedit tools/setup_helpers/nccl.py
USE_NCCL = False
sudo nvpmodel -m 0
cd /usr/bin/
sudo jetson_clocks
# 4. install numpy, thop, and tqdm
sudo apt-get install python3-numpy
sudo pip3 install thop
sudo apt install python3-tqdm
# 5. install pycuda
sudo pip3 install pycuda
sudo pip3 -vvv install pycuda
export PATH=/usr/local/cuda-7.0/bin:$PATH =>check cuda version
sudo su -
pip3 install pycuda
reboot
sudo pip3 install pycuda
# 6. download FSFNet
cd FSFNet/eval
cd FSANet/eval/latency
python eval_forwardTime.py
-
Average results
Method IoU Classes iIoU Classes IoU Categories iIoU Categories FSFNet 68.3798 42.2927 86.4462 72.714 FSFNet(pretrained) 69.1319 43.0262 86.5888 72.554 -
Class results(IoU)
Method road sidewalk building wall fence pole traffic light traffic sign vegetation terrain sky person rider car truck bus train motorcycle bicycle FSFNet 97.7996 81.1904 89.7836 40.713 46.297 54.2191 61.0444 65.709 91.8087 69.031 94.0309 77.3874 57.5401 92.8033 47.69 61.4249 56.1338 48.955 65.6548 FSFNet(pretrained) 97.7055 81.1631 90.2109 41.7583 47.0695 54.1891 61.1365 65.3923 91.8746 69.4297 94.2097 77.8652 57.8774 92.887 47.3863 64.4488 59.4483 53.1812 66.2731
-
Class results(IoU)
Method IoU Classes FSFNet 63.26 Method Sky Building Pole Road Pavement Tree SignSymbol Fence Car Pedestrian Bicyclist FSFNet 91.5 79.37 29.79 90.22 70.33 76.14 39.5 40.47 78.68 48.62 51.28
- Class results(IoU)
Method IoU Classes FSFNet 24.5
- Segmentation training and evaluation code from ERFNet
- Performance valuation of latency speed code from Fasterseg
- Cityscapes dataset is from Cityscapes
- Computes class weights as described in the ENet paper
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License, which allows for personal and research use only. For a commercial license please contact the authors. You can view a license summary here: http://creativecommons.org/licenses/by-nc/4.0/