Svaf:Stereo Vision Algorithm Framework. Svaf采用简洁的配置文件组织算法,目前包含以下模块:
- 统一视频图像输入接口
- 图像处理算法
- 目标识别算法
- 目标跟踪算法
- 特征点提取算法
- 立体匹配算法
- 点云重建算法
- 点云配准算法
- 数据记录和表格输出
目前Svaf仅由个人维护,仅支持Windows平台。任何Svaf源码的使用都需要遵守BSD2相关开源许可。
立体视觉算法模块众多,参数复杂,为了更方便进行双目立体视觉算法的研究和开发,于是将各种算法通过配置文件组织起来。Svaf设计上参考了Caffe,将不同算法模块封装成层,通过配置文件将将各个层链接起来,在运行时算法就会按照规定的路径运行。
Savf适合双目立体视觉的开发者,如果你拥有多个相机,那么Svaf也能良好工作,只是其中某些模块的处理结果并非你所期望的,开发者正试图将Svaf推向拥有三个及以上相机的系统。
-
Visual Studio
要求VS2012及以上,推荐版本VS2013,开发者使用的是VS2013
-
OpenCV
要求OpenCV版本2.4以上,推荐版本2.4.13,OpenCV3.1很久没更新了,并不推荐
-
ProtoBuf
需要下载源码自行编译。推荐版本2.6以上,如果你使用的是3.0以上版本,那么在书写算法配置时,需要在开头注明
syntax = "proto2";protocolbuffer是google的一种数据交换格式,在本程序中被用来管理算法参数 -
Glog
需要下载源码自行编译。可以下载到的版本都可以(这个也是很久没更新了),Glogs在本程序中用来输出日志文件以及检查参数
-
Gflags
需要下载源码自行编译。推荐版本2.0及以上,Gflags用于命令行参数解析
-
Matlab
版本7.5及以上,推荐Matlab2012a及以上
-
Intel Compiler
可选择,是否安装Intel的编译器。一般来说Intel的编译器更加优秀,编译出的代码运行速度更快,版本12及以上,开发者使用的是Inter Compiler 16.0,如果你使用VS自带编译器。
-
PCL
PCL版本1.7.2及以上,推荐版本1.8.0版本。PCL点云库用来处理点云数据,并提供点云结果的可视化输出。
-
开始
下载源码,用Visual Studio打开工程,右键解决方案中的StereoVisionAlgorithmFramework工程,点击
属性打开工程属性窗口 -
配置OpenCV
编译好opencv之后,在环境变量中添加
OPENCV_ROOT项,值为D:\opencv\build(opencv路径),然后属性表会自动加载。 如果选择不使用属性表,也可以自己配置include目录、lib目录、link库列表,也可以使用#pragma comment(lib, 'opencv_XXX_2413.lib')来进行链接。如果是动态库,那么还需要在系统的环境变量中加入bin目录,以调用dll。 这里需要表明,如果这里采用动态库,那么在编译下面三个库时,请编译相应的动态库,如果你调用的是OpenCV的静态库,那么在项目属性页面中修改C++ -> CodeGeneration -> RunTime Libraty: = /MT,于是在后面编译protobuf、glog和gflags的时候,就也需要做同样的设置。 -
配置Protobuf
下载protobuf源码,使用cmake生成VS工程。进入VS后设置生成选项,这里的设置(x86,x64,debug,release,/MT,/MD)要和后面几个库统一。将编译好的lib、dll以及目录下本来就存在的.h头文件提取出来。在项目工程中加入include目录,lib目录,并设置链接库。
-
配置Gflags
同Protobuf配置过程类似,需要自行下载源码编译。
-
配置Glog
与Protobuf配置过程类似,需要自行下载源码编译。 在工程中包含目录include时,include的子目录应有如下结构
include/google/protobuf include/opencv include/opencv2 include/glog include/gflags这样就只需要包含include一个文件夹了,并且特别注意,protobuf的上一层一定要有google这个目录
-
配置Matlab
为了方便直接调用属性表,我们增加一个环境变量
MATLAB_ROOT,值为D:\Program Files\MATLAB\R2017a由于Svaf中一些模块调用了Matlab,所以需要在程序中设置Matlab的include目录和lib目录。 点开属性页面,设置include目录为MATLAB_ROOT/extern/include,32位开发环境设置lib目录为MATLAB_ROOT/extern/lib/win32/microsoft,64位开发环境设置lib目录为MATLAB_ROOT/extern/lib/win64/microsoft(如果调用了属性表,这几项会自动加载)。 由于如下代码已经在Svaf工程中添加,所以无需再设置链接Matlab库。#pragma comment(lib, 'libeng.lib') #pragma comment(lib, 'libmx.lib') #pragma comment(lib, 'libmat.lib') #pragma comment(lib, 'libmex.lib')最后需要在系统路径中添加环境变量
MATLAB_INSTALL_PATH/bin/win64到Path中 -
配置PCL库
使用OneInAll安装包配置PCL库,并添加SVAF提供的属性表直接配置PCL环境,对于Intel编译器需要另外编译Boost库。在安装PCL库之后,首先需要添加如下路径到系统环境变量
%PCL_ROOT%\bin %OPENNI2_REDIST64% (or %OPENNI2_REDIST%) %PCL_ROOT%\3rdParty\FLANN\bin %PCL_ROOT%\3rdParty\VTK\bin %PCL_ROOT%\Qhull\bin %PCL_ROOT%\3rdParty\OpenNI2\Tools在VS中导入属性表之后,在编译程序时仍有可能报错,这是因为使用了许多第三方库。首先请务必开启C++11支持,如果你使用的是VS2013,请确保VS2013升级至Update5,否则在编译boost库相关部分时可能报错。如果同时使用OpenCV和PCL,那么flann库可能发生冲突,需要在报错的
flann前面加上全局命名空间::flann,并且如果需要使用opencv的flann,那么需要使用cv::flann来进行空间声明。请务必启用NOMINMAX宏,防止stl库定义min和max,以防止其与STL中的min和max宏名冲突,当然,也可以手工在PCL头文件中max出现处添加括弧标识(std::max)(a,b)来避免编译器将max解释为宏。 -
添加数据文件
下载bgr2luv.dat文件,放置到
SVAF\bgr2luv.dat和\AcfDetect\bgr2luv.dat。该文件是在目标检测时使用的色彩空间转换表,数据过大,不利于git提交和下载,所以分离出来单独下载。
-
Proto文件的编译
cd SVAF/svaf/ protoc --cpp_out=./ svaf.proto
或者直接运行
SVAF/svaf/build.bat
-
Camera Calibration Toolbox for Matlab
这个工具箱实现了张正友法相机标定,Svaf和标定相关模块的参数需要该工具箱进行离线标定
-
Piotr's Computer Vision Toolbox
Svaf中的Adaboost模块采用该工具箱中的算法,使用该工具箱进行离线训练
-
把该工程算法的配置文件粘贴到这个页面,使用#注释掉第一个bottom
#bottom: "data"可以自动生成算法的框架图哦。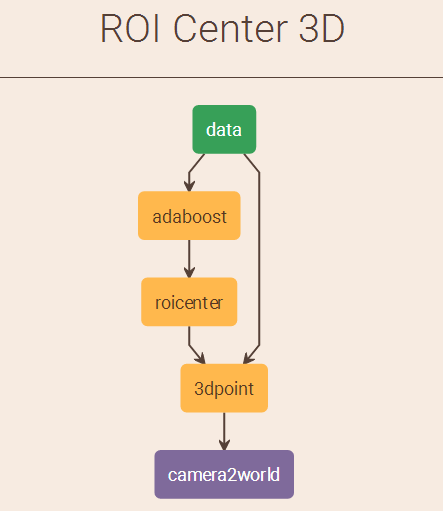

-
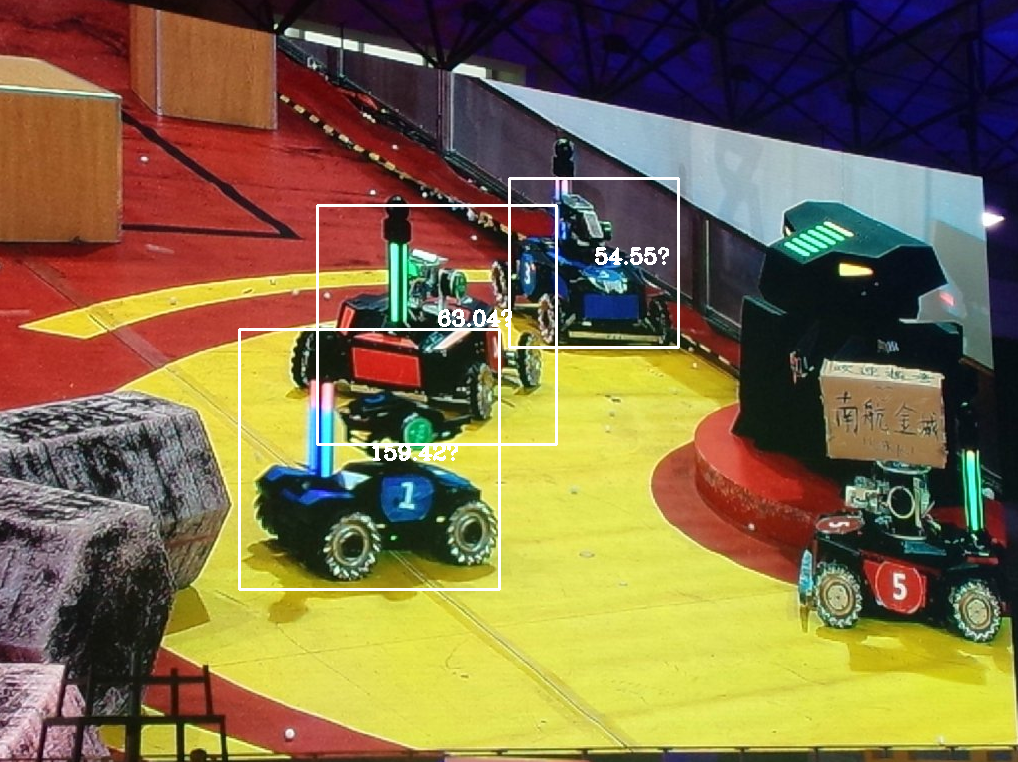
目标识别
detect.pbf:
# configure text name: "adaboost detect" version: "v0.1" layer{ name: "data" type: IMAGE bottom: "data" top: "adaboost" imagedata_param{ name: "F:/VS/StereoVisionAlgorithmFramework/AcfDetect/a.jpg" name: "F:/VS/StereoVisionAlgorithmFramework/AcfDetect/b.jpg" #可以按顺序处理多张图片 } } layer{ name: "adaboost" type: ADABOOST bottom: "data" top: "adaboost" adaboost_param{ detector: "F:/VS/StereoVisionAlgorithmFramework/AcfDetect/acfCarDetector.dat" #利用工具箱训练得到的分类器 thresh: 40 #分类时检测的阈值 } }结果输出有三种类型,一种是日志信息,另一种是图像显示,还有就是对某些模块,一些参数会输出到特定设备。运行以上文件时,算法使用一个分类器检测一个目标,输入如下结果
同时以下是log目录下的日志文件
Log file created at: 2016/11/01 10:36:05 Running on machine: PC Log line format: [IWEF]mmdd hh:mm:ss.uuuuuu threadid file:line] msg I1101 10:36:05.182090 4536 main.cpp:21] Svaf Copyright(c) 2016, Peng Chao ... I1101 10:36:05.273578 4536 Circuit.cpp:45] data -> I1101 10:36:05.274580 4536 Circuit.cpp:59] -> adaboost I1101 10:36:05.275583 4536 Circuit.cpp:53] Build All Layers. I1101 10:36:05.276588 4536 Circuit.cpp:153] Layer [data] Builded. I1101 10:36:05.277590 4536 Circuit.cpp:153] Layer [adaboost] Builded. I1101 10:36:05.307694 4536 Param.cpp:179] Fetched Image: F:/VS/StereoVisionAlgorithmFramework/AcfDetect/a.jpg I1101 10:36:05.773938 4536 AdaboostLayer.cpp:156] Adaboost Detected <4> Object I1101 10:36:05.774938 4536 AdaboostLayer.cpp:77] Box: 332.5, 261.253 ... I1101 10:36:44.429144 4536 main.cpp:28] Done. -
特征匹配
StereoVisionAlgorithmFramework/svaf/surfmatchwithransac.pbf该配置文件粘贴到NetScope上可以生成如下网络结构图(粘贴时注意注释掉第一个bottom哦)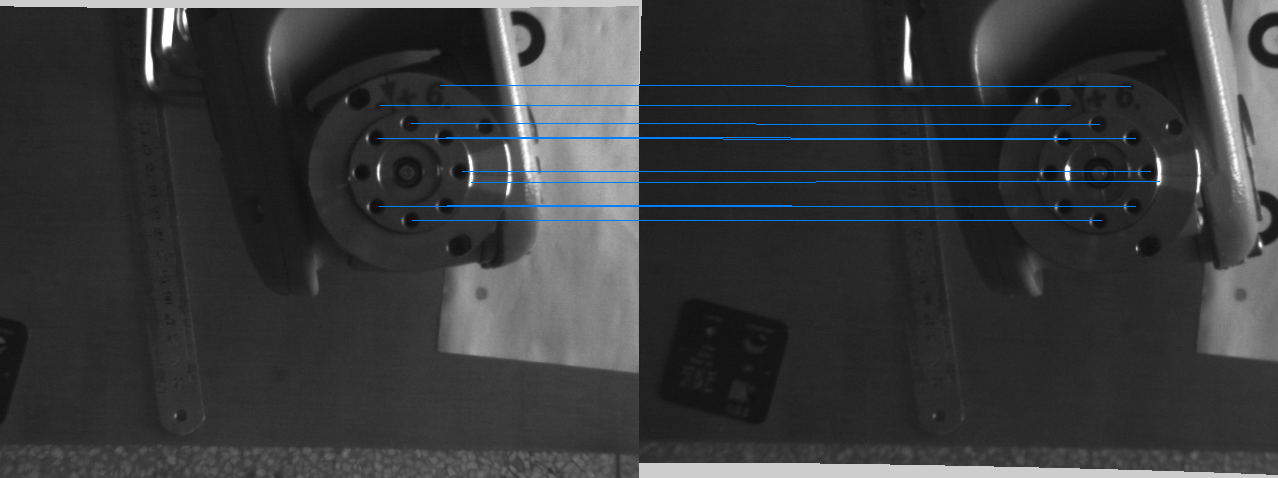
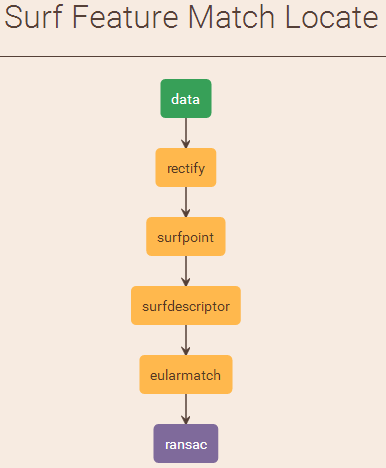
# configure text name: "Surf Feature Match Locate" version: "v0.1" layer{ name: "data" type: IMAGE_PAIR bottom: "data" top: "rectify" imagepair_param{ pair{ left: "F:/MATLAB/left/I01.bmp" right: "F:/MATLAB/right/I01.bmp" } } } layer{ name: "rectify" type: RECTIFY # 立体校正 top: "surfpoint" rectify_param{ filename: "F:/MATLAB/calibration/rectify.dat" # Matlab工具箱生成的校正矩阵 } } layer{ name: "surfpoint" type: SURF_POINT # Surf特征点检测 bottom: "rectify" top: "surfdescriptor" surfpoint_param{ stride: 2 octaves: 5 intervals: 4 thresh: 0.00005 } } layer{ name: "surfdescriptor" type: SURF_DESP # Surf特征描述 bottom: "surfpoint" top: "eularmatch" } layer{ name: "eularmatch" type: EULAR_MATCH # 欧氏距离筛选 bottom: "surfdescriptor" top: "ransac" eularmatch_param{ thresh: 0.65 } } layer{ name: "ransac" type: RANSAC # Ransac筛选匹配点 bottom: "eularmatch" top: "ransac" ransac_param{ thresh: 5.0 } } -
双目测量
StereoVisionAlgorithmFramework/svaf/binocularlocate.pbf该配置文件描述的算法具有如下结构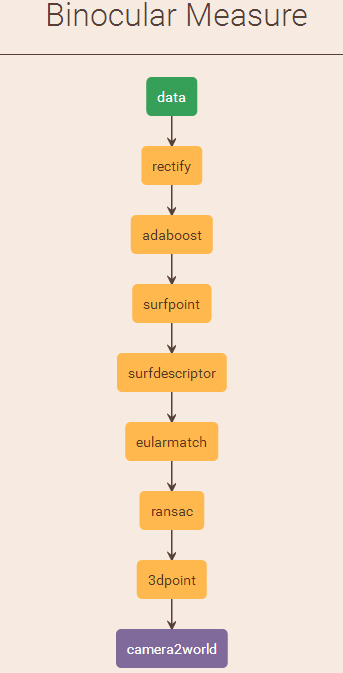
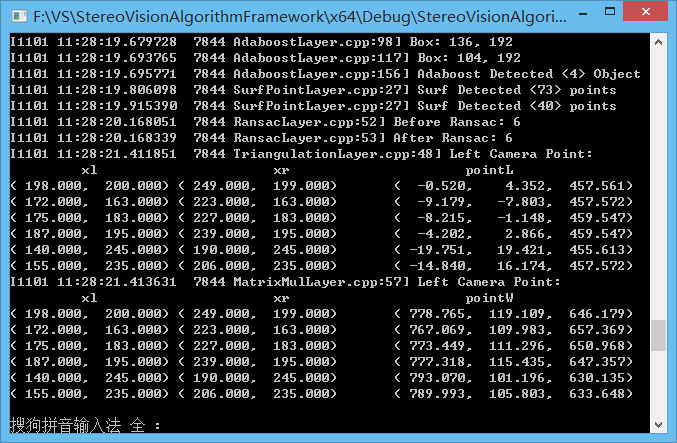
最终控制台会输出检测出特征点的三维坐标:pointL是左相机坐标系的坐标,pointW是世界坐标系坐标





对应版本:v_1.21
-
Layer
所有层的基类,虚类,提供虚函数Run接口。提供时间统计函数,提供层名name,控制显示show,控制保存结果save,控制输出日志控制logi,logt等变量。
message LayerParameter{ optional string name = 1; optional string bottom = 2; optional string top = 3; optional bool show = 4 [default = false]; optional bool save = 5 [default = false]; optional bool logt = 6 [default = false]; optional bool logi = 7 [default = false]; enum LayerType{ NONE = 0; IMAGE = 1; ... RECTIFY = 141; } optional LayerType type = 10; } -
AdaboostLayer
message AdaboostParameter{ optional string detector = 1; optional bool sync_frame = 2 [default = false]; optional bool sync_video = 3 [default = false]; optional bool sync_epipolar = 4 [default = false]; optional float thresh = 5 [default = 0]; optional float nms = 6 [default = 0.65]; optional ROIExtention pad_rect = 7; }Adaboost层会自动剪裁图像,图像中置信度最高的区域会被作为ROI自动剪裁出来,同时,图像Block类中的
roi会对应改变,Block中的roi永远都是相对于最初的图像,而Block类中的point则是相对当前图像的。 Adaboost算法为双目版本提供极线约束优化,sync开启时,左右图像ROI大小相同,epipolar开启时,左右图像的roi在同一水平线上,此时形成极线约束。 可以通过ROIExtention对检测结果进行调整(如上下平移,拓展边界等) -
DataLayer
message DataParameter{ optional bool color = 1; }数据层支持多种数据来源和格式,包括图像、视频、网络摄像头、图像文件夹、Kinect摄像头等,除此之外还有进程通信接口,可通过其它进程的内核映射对象获取数据。数据来源被封装在程序中,这一层仅仅控制图像的色彩通道是单通道还是三通道。
-
MatrixMulLayer
message MatrixMulParameter{ optional string filename = 1; optional string col0 = 2; optional string col1 = 3; optional string col2 = 4; }使用一个3*4矩阵,完成相机坐标系和世界坐标系间的转换。支持二进制文件和配置文件直接输出两种形式,二进制文件为matlab直接保存的格式。
-
MilTrackLayer
message MilTrackParameter{ enum InitType{ MOUSE = 1; SELECT = 2; AUTORECT = 3; ADABOOST = 4; } optional InitType init_type = 1 [default = AUTORECT]; enum TrackType{ MIL = 1; ADA = 2; MIL_GRAY = 11; MIL_RGB = 12; MIL_LUV = 13; MIL_HSV = 14; } optional TrackType track_type = 2 [default = MIL]; optional int32 track_count = 3 [default = 20]; repeated InitRectParameter init_rect = 4; optional uint32 tr_width = 5 [default = 200]; optional uint32 tr_height = 6 [default = 150]; optional float scalefactor = 7 [default = 0.5]; optional uint32 init_negnum = 11 [default = 65]; optional uint32 negnum = 12 [default = 65]; optional uint32 posmax = 13 [default = 100000]; optional uint32 srchwinsz = 14 [default = 25]; optional uint32 negsample_strat = 15 [default = 1]; optional uint32 numfeat = 16 [default = 250]; optional uint32 numsel = 17 [default = 50]; optional float lrate = 21 [default = 0.85]; optional float posrad = 22 [default = 1.0]; optional float init_posrad = 23 [default = 3.0]; optional uint32 haarmin_rectnum = 24 [default = 2]; optional uint32 haarmax_rectnum = 25 [default = 6]; optional bool uselogr = 29 [default = true]; // only avaliable on binocular track optional bool tss = 31 [default = false]; optional bool pool = 32 [default = false]; optional bool sync = 33 [default = false]; optional bool mixfeat = 34 [default = false]; optional bool showprob = 35 [default = false]; }MIL图像跟踪,可以选择是手动框选目标,还是使用Adaboost自动框选目标,同时也可以选择是没格多少帧自动调用Adaboost算法进行目标检测。
-
BinoTrackLayer
_MILTrackLayer_的双目实例,参数表与_MILTrackLayer_相同
-
RansacLayer
message RansacParameter{ optional float thresh = 1 [default = 5]; }使用Ransac算法筛选匹配点对,可以调整的参数为筛选阈值,一般需要在运行Ransac之前需要一个初匹配,防止计算量过大
-
StereoRectifyLayer
message StereoRectifyParameter{ optional string filename = 1; }读取Matlab工具生成的映射表进行立体矫正
-
CVPointLayer
message CVPointParameter{ enum PointType{ FAST = 1; FASTX = 2; MSER = 3; ORB = 4; BRISK = 5; FREAK = 6; STAR = 7; SIFT = 8; SURF = 9; GFTT = 10; HARRIS = 11; DENSE = 12; SBLOB = 13; AKAZE = 14; } optional PointType type = 1; optional bool isadd = 2 [default = false]; optional FastParamCP fast_param = 11; //optional FastParamCP fastx_param = 12; optional MSERParamCP mser_param = 13; optional ORBParamCP orb_param = 14; optional BriskParamCP brisk_param = 15; optional FreakParamCP freak_param = 16; optional StarParamCP star_param = 17; optional SiftParamCP sift_param = 18; optional SurfParamCP surf_param = 19; optional GFTTParamCP gftt_param = 20; optional HarrisParamCP harris_param = 21; optional DenseParamCP dense_param = 22; optional SimpleBlobParamCP sb_param = 23; optional AkazeParamCP akaze_param = 24; }集成了OpenCV中9种特征点检测算法
-
CVDescriptorLayer
message CVDescriptorParameter{ enum DespType{ SIFT = 1; SURF = 2; BRIEF = 3; BRISK = 4; ORB = 5; FREAK = 6; OPPONENT = 7; } optional DespType type = 1; optional BriefDespCV brief_param = 2; }集成了OpenCV中多种特征描述子算法
-
CVMatchLayer
message CVMatchParameter{ enum MatchType{ BFL1 = 1; BFL2 = 2; BFH1 = 3; BFH2 = 4; FLANN = 5; } optional MatchType type = 1; optional bool crosscheck = 2 [default = true]; }集成了OpenCV中2种特征匹配算法
-
SurfPointLayer
Surf特征点检测
-
SurfDescriptorLayer
对特征点进行Surf描述
-
StereoLayer
抽象立体层,其中封装了PCL点云库中的多种算法,用于需要处理点云数据的层来继承
-
TriangluarationLayer
message TriangularParameter{ optional bool visible = 1 [default = true]; optional string toolbox_dir = 2; optional string calibmat_dir = 3; optional bool savepc = 4 [default = false]; optional string pcname = 5 [default = "./ref_pointcloud.pc"]; }将左右相机的二维图像坐标,转换为相机世界坐标,调用Matlab实现,需要Matlab支持
-
CenterPointLayer
直接将目标检测中心位置作为最终结果进行输出,由于只是计算二维中心点,所以不需要额外参数,二维点映射三维坐标的任务交给其它层完成
-
EadpMatchLayer
message EADPMatchParameter{ optional int32 max_disp = 1 [default = 24]; optional int32 factor = 2 [default = 2560]; optional int32 guidmr = 3 [default = 1]; optional int32 dispmr = 4 [default = 1]; optional float sg = 5 [default = -25.0]; optional float sc = 6 [default = 25.5]; optional float r1 = 7 [default = 10]; optional float r2 = 8 [default = 500]; optional string prefix = 9 [default = "./eadp"]; optional bool savetxt = 10 [default = false]; }进行Eadp立体匹配,计算视差
-
SGMMatchLayer
message SGMMatchParameter{ optional int32 max_disp = 1 [default = 24]; optional int32 factor = 2 [default = 2560]; optional int32 dispmr = 3 [default = 1]; optional float r1 = 4 [default = 10]; optional float r2 = 5 [default = 500]; optional string prefix = 6 [default = "./sgm"]; optional bool savetxt = 7 [default = false]; }进行SGM立体匹配,计算视差
-
SupixSegLayer
message SuperPixelSegmentParameter{ optional int32 K = 1 [default = 400]; optional int32 M = 2 [default = 10]; optional bool optint = 3 [default = true]; optional bool saveseg = 4 [default = false]; optional string segname = 5 [default = "./supix.seg"]; }进行超像素分割
在框架运行过程中,可以使用以下按键对算法进行暂停、退出、初始化等控制:
- Q: Quit
- E: Exit
- P: Pause
- R: Reinitiate
- 为代码添加注释
- 修复bug,在构建链表之前摧毁链表
- 添加进程间通信功能
- 与GUI进程联合调试
- 增加点云初始配准层,支持输出欧拉角
- 使用系统变量配置环境,完善配置说明
- 增加BSD2开源协议
- SVAF项目开源 RVAF
- 默认使用VS12编译环境和MATLAB2017a
- 删除FeaturePoolLayer
- 完善配置说明
- 修复v_1.10版本以来,立体匹配算法的Bug
- 增加logt控制是否记录时间,增加logi待用控制记录信息
- 完善双目跟踪的共享特征共享训练,显示概率图的显示控制
- 对双目跟踪进行OpenMP优化
- 开启Release版本下ICC的C++11支持
- 增加双目跟踪层,具备简单的极线约束功能和共同训练功能
- MILTrack增加多通道特征选择功能
- 修复MIL跟踪特征筛选过程中的一处书写错误
- 修复了网络摄像头打开失败的Bug
- 修复了MILTrack同时跟踪多幅图像初始化的Bug
- 增加FeaturePool层,实现特征描述子对的匹配
- 增加图片结果保存功能
- Layer层的保护变量全部采用双下划线标识
- MIL图像跟踪增加R键重新选择区域
- 增加pair结构的伪注释_pair
- 在FeaturePool中实现了ICP点云配准,POSIT等五种位姿解算方法(但是效果都不好,lol)
- ICC开启C++11支持,以避免icp中的error
- 修复pcl中大量max宏冲突,并删除Supix中的minmax宏
- 为特征池构建了框架
- 重整计时部分为计时器类,在Layer中声明,去除Layer中琐碎的接口
- 使用_OPENMP宏控制openmp是否开启加速
- 移交了Adaboost的显示部分,重新整理Adaboost部分结构
- 为Adaboost添加Mil接口
- 增加MIL图像跟踪模块
- 使用OpenMP加速技术
- 修复SVAF中若干Bug,SVAF能稳定的进行各项数据采集测试
- 增加实验数据采集模块,可以输出直接导入Excel和MATLAB的表格文本文件
- 增加时间采集模块
- 整理工程目录和属性表,规范化工程
- 工程名称正式定为__SVAF__(以往使用全称__StereoVisionAlgorithmFramework__)
- PCL Comes to SVAF
- 修复立体匹配math.h冲突的Bug
- 修复PCL库中max宏名冲突的Bug
- 三维重建层输出pcd点云
- 规范成员函数指针
- 增加Adaboost的区域调整参数
- 完善Eadp和Sgm的点云输出
- 修改三维重建层,点云数目过大时不输出结果参数
- 增加Supix模块
- 增加了SupixLayer超像素分割处理层
- 增加了Eadp立体匹配和Sgm立体匹配处理层计算视差
- 修复了Opencv特征点检测模块的Bug
- 移交了自写Eular匹配的显示部分至模块内部
- 添加了EU极线约束模块
- 增加显示控制选项,显示集中由配置文件控制
- 完善OpenCV特征点提取的控制参数
- 增加OpenCV特征匹配的控制参数
- 增加对OpenCV的特征点提取和特征描述支持
- 对triangleLayer增加三维坐标可视化
- 对Run重载为bool型,一般性错误不终止程序,直接处理下一帧,并在日志中记录错误
- 增加IMAGE_FOLDER类型,可以直接读取整个文件夹,对应的书写了相应的Matlab工具
- 修正矩阵乘法层坐标变换计算的错误
- 对调用Matlab进入相对路径部分进行优化
- 修复亚像素点坐标小数位丢失的bug
- 修复坐标信息日志记录不全的bug
- 增加matlab工具箱目录参数,matlab工具箱目录可由文件配置
- Adaboost层nms参数可用
- Release版本可用
- 增加数据层参数,控制图像通道数
- Svaf发布
- Adaboost模块、Surf模块、Camera模块、立体矫正模块、向量匹配模块、双目测量模块可用
- SurfDetect模块接入
- EularLayer接入
- RansacLayer接入
- TriangulationLayer接入
- StereoRectifyLayer接入
- AcfDetect模块加入约束
- AcfDetect模块接入
- DSPCamera模块加入
- Svaf Build