Motion Planning Library with ROS
Self-directed independent study.
Installation Guide:
git clone git@github.com:moribots/motion_planning.gitwstool init(uses the nuturtle.rosinstall file to get my rigid2d library and other utilities)
-
The
mappackage:roslaunch map viz_map.launch- Probabilistic Roadmap:
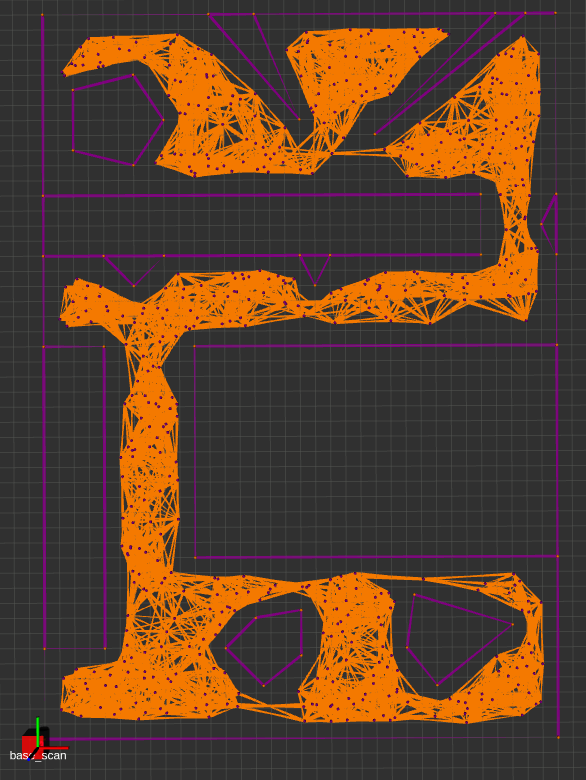
- Tunable-resolution Grid Map
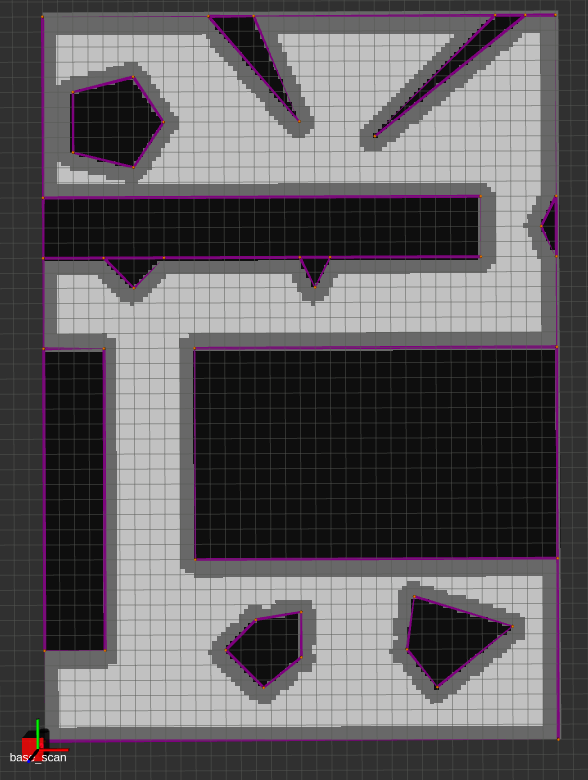
-
The
global_plannerpackage:- A* (green) on PRM:
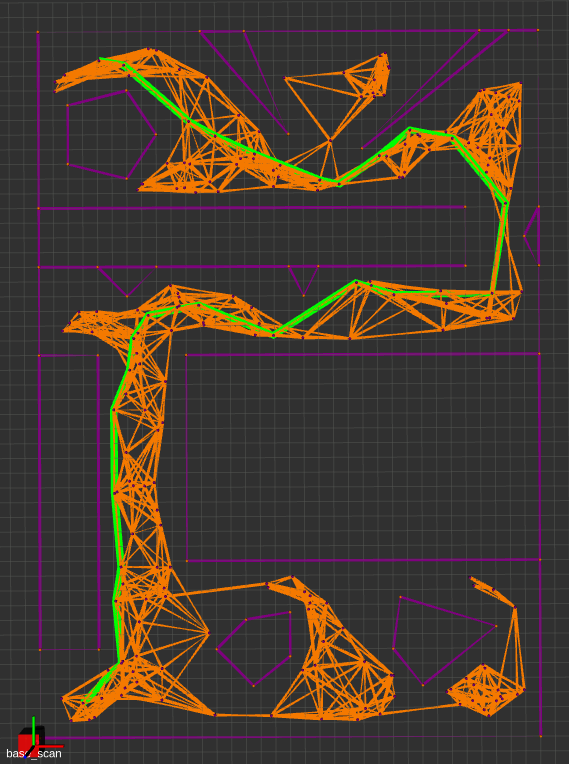
- Theta* (green) on PRM (A* in red for comparison):
roslaunch global_planner astar.launch

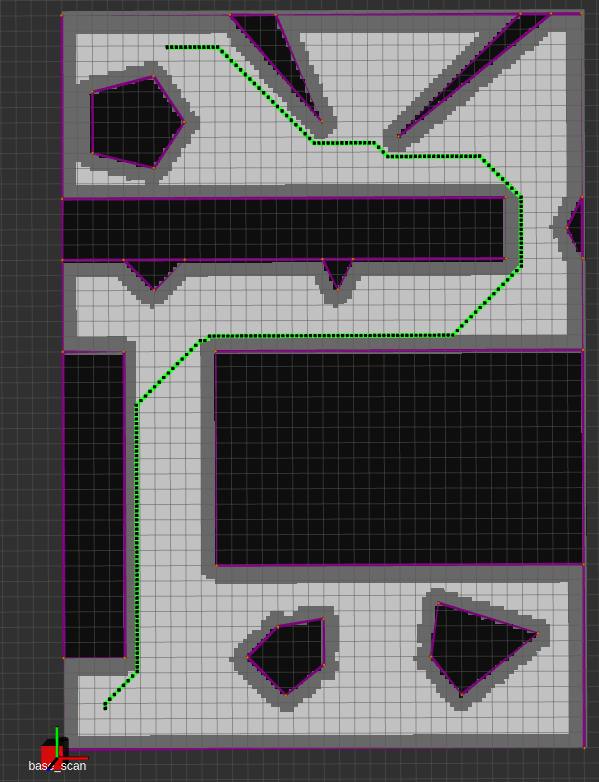
- A* (green) on Grid
- LPA* with Simulated Grid Updates [re-evaluated cells in orange]:
roslaunch global_planner incremental.launch lpa:=True
- D* Lite on Grid [re-evaluated cells in orange]:
roslaunch global_planner incremental.launch
- Naive Potential Field (Local Minimum Escape TBD):
roslaunch global_planner potential_field.launch








-
Trajectory Optimization:
- Model Predictive Path Integral Control on a parallel parking task:
roslaunch control mppi_pentagon.launch parallel:=True
- The associated states and controls for the above demo:
NOTE: To launch waypoint following method, simply don't include the
parallelargument.In a separate terminal, do:
rosservice call /set_pose "x: 0.0 y: 0.0 theta: 0.0"To start the node.
- Model Predictive Path Integral Control on a parallel parking task:

