- Kinect采集彩色图,深度图,点云
- 彩色图深度图对齐
依赖项: Kinect SDK提供了获取传感器数据和相机信息的API;需要用到Opencv的图像数据结构、显示、存储等;PCL中用到点云数据结构,点云存取等;
- Kinect SDK 2.0
- Opencv
- PCL
两种配置方法:
- VS添加Kinect SDK属性表的方式(不推荐使用,对每个依赖库手动添加属性表比较繁琐);
- 使用Cmake 推荐方式
由于CMAKE配置方式配置过程简单,项目构建与调整更加灵活,只介绍CMake配置方法;
- visual studio版本需要等于或高于目标平台。即,你计划用vc14 x64的编译配置,那么vs版本不能低于2015版;
- opencv、pcl库的编译选项一定需要和目标编译选项一致。建议下载预编译版本的OPENCV与PCL,注意下载时,选择与目标平台相同的预编译版本;如
PCL-1.8.1-AllInOne-msvc2017-win64.exe与opencv-3.4.0-vc14_vc15.exe均为vc15 x64的配置,在用CMAKE编译自己代码时,平台选择应相同。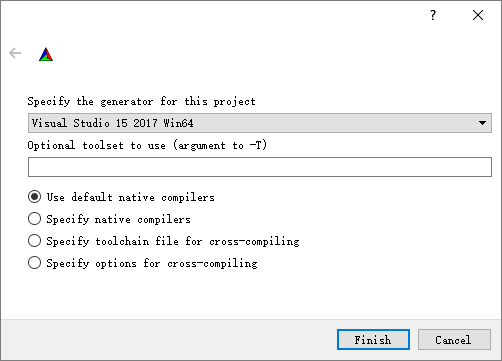

- 添加Kinect sdk2的cmake配置文件。将Samples目录下的
FindKInectSDK2.cmake文件复制到Cmake安装目录下的share\cmake-3.10\Modules\文件夹中。例如:D:\CMAKE\share\cmake-3.10\Modules。
- 可自己编译或下载预编译版本
- 注意平台一致性
- Opencv环境变量
- 在系统变量中添加
OpenCV_DIR,值为build目录下包含OpenCVConfig.cmake文件的文件夹路径。例如:D:\opencv3.2\build_vc15_x64\install; - 在环境变量
Path中添加opencvbin目录,例如:D:\opencv3.2\build_vc15_x64\install\bin
- 在系统变量中添加
可自行编译或下载预编译版本。 **注意:**预编译版本需要跟自己电脑的Visual studio版本一致;且不要忘记添加相应的环境变量
# Example CMakeLists.txt
# FindKInectSDK2.cmake copy to CMake\share\cmake-3.5\Modules or same directory as this file
cmake_minimum_required( VERSION 2.8 )
set( CMAKE_MODULE_PATH "${CMAKE_CURRENT_SOURCE_DIR}" ${CMAKE_MODULE_PATH} )
project( Kinect_v2_Tutorial )
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ./bin)
# Find Kinect SDK v2
find_package( KinectSDK2 REQUIRED )
FIND_PACKAGE(OpenCV REQUIRED)
INCLUDE_DIRECTORIES(${OpenCV_INCLUDE_DIRS})
# Settings Kinect SDK v2
include_directories( ${KinectSDK2_INCLUDE_DIRS} )
link_directories( ${KinectSDK2_LIBRARY_DIRS} )
# Find Packages
find_package(PCL 1.8 REQUIRED)
# Additional Include Directories
# [C/C++]>[General]>[Additional Include Directories]
include_directories( ${PCL_INCLUDE_DIRS} )
# Preprocessor Definitions
# [C/C++]>[Preprocessor]>[Preprocessor Definitions]
add_definitions( ${PCL_DEFINITIONS} )
add_definitions( -DPCL_NO_PRECOMPILE )
# Additional Library Directories
# [Linker]>[General]>[Additional Library Directories]
link_directories( ${PCL_LIBRARY_DIRS} )
# 可按下面的格式添加自己的源文件
add_executable( camera_calibration camera_calibration.cpp )
add_custom_command( TARGET camera_calibration POST_BUILD ${KinectSDK2_COMMANDS} )
set_property( DIRECTORY PROPERTY VS_STARTUP_PROJECT "camera_calibration" )
target_link_libraries( camera_calibration ${OpenCV_LIBS} ${KinectSDK2_LIBRARIES} )