在unity3D官网下载 Unity-Hub。需要注册Unity账号以获得 personal free license 。
打开 Unity-Hub, 在左侧Install栏目安装Unity编辑器,建议安装2021年的LTS版本。
在 Unity-Hub 的Projects栏目选择[打开工程],打开仓库中的 UAV_sample 工程。
开启一个新的终端,启动TCP_Connector:
cd ROS-Unity_bridge &
catkin_make &
source devel/setup.bash &
roslaunch ros_tcp_endpoint endpoint.launch
开启一个新的终端,启动EGO_planner:
cd EGO-Planner-v2 &
catkin_make &
source devel/setup.bash &
roslaunch ego_planner single_drone_interactive.launch
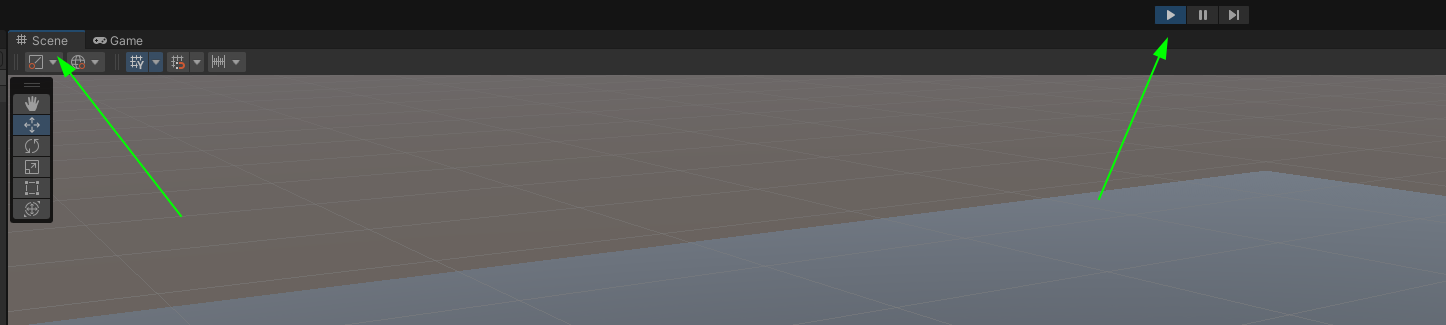
点击运行模拟,并且切换到场景视角。
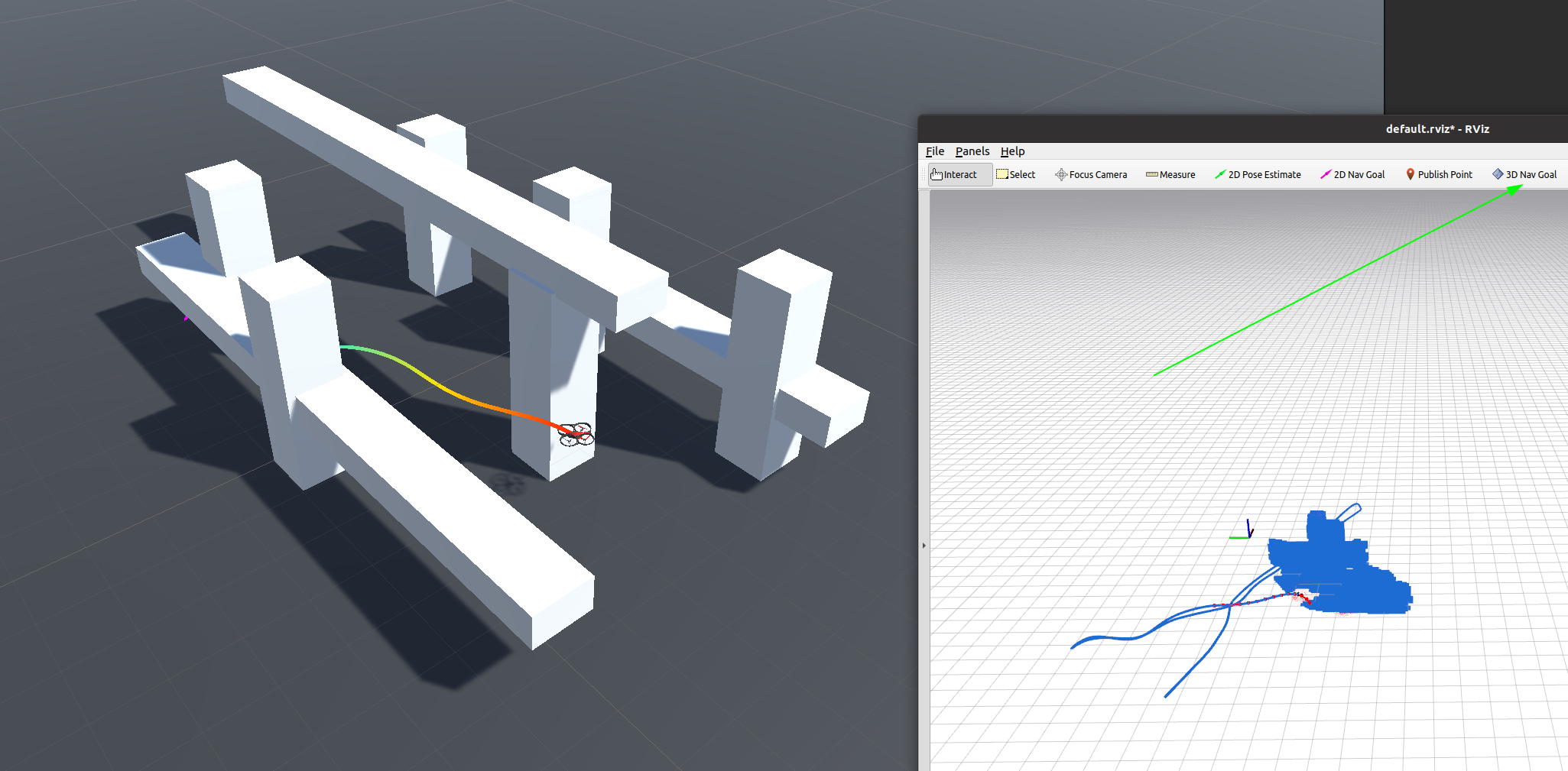
使用3D nav goal工具在rviz中点击目标点,即可实时在unity中运行。
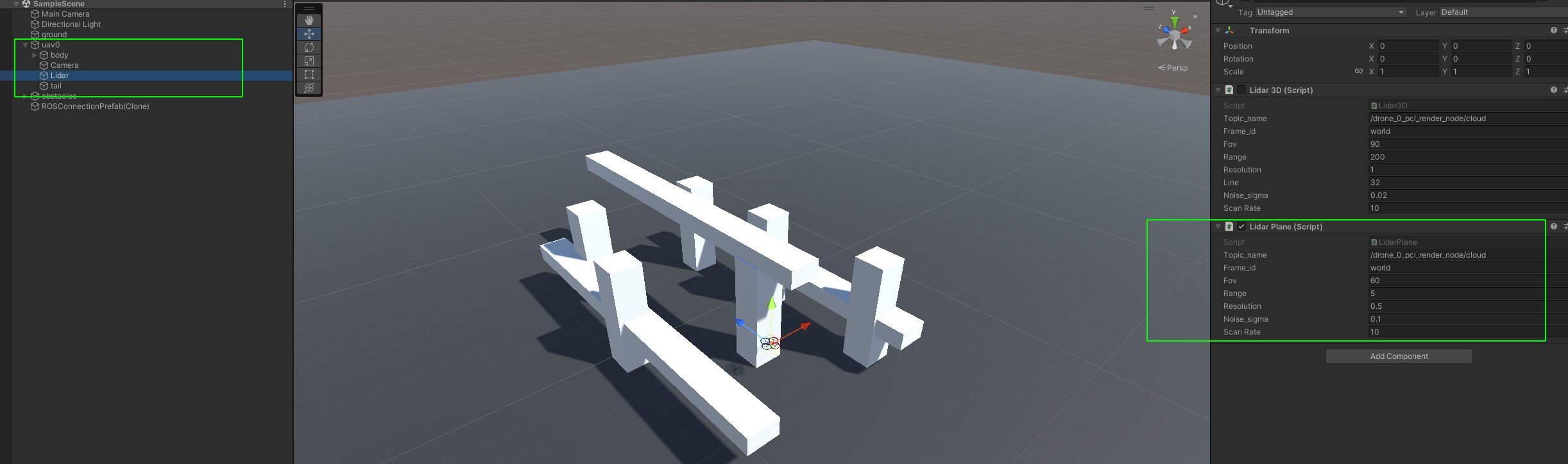
选择所需的传感器,在右侧可以编辑传感器的属性。
注意:如果在运行时更改参数,停止运行后不会保存期间的任何修改。
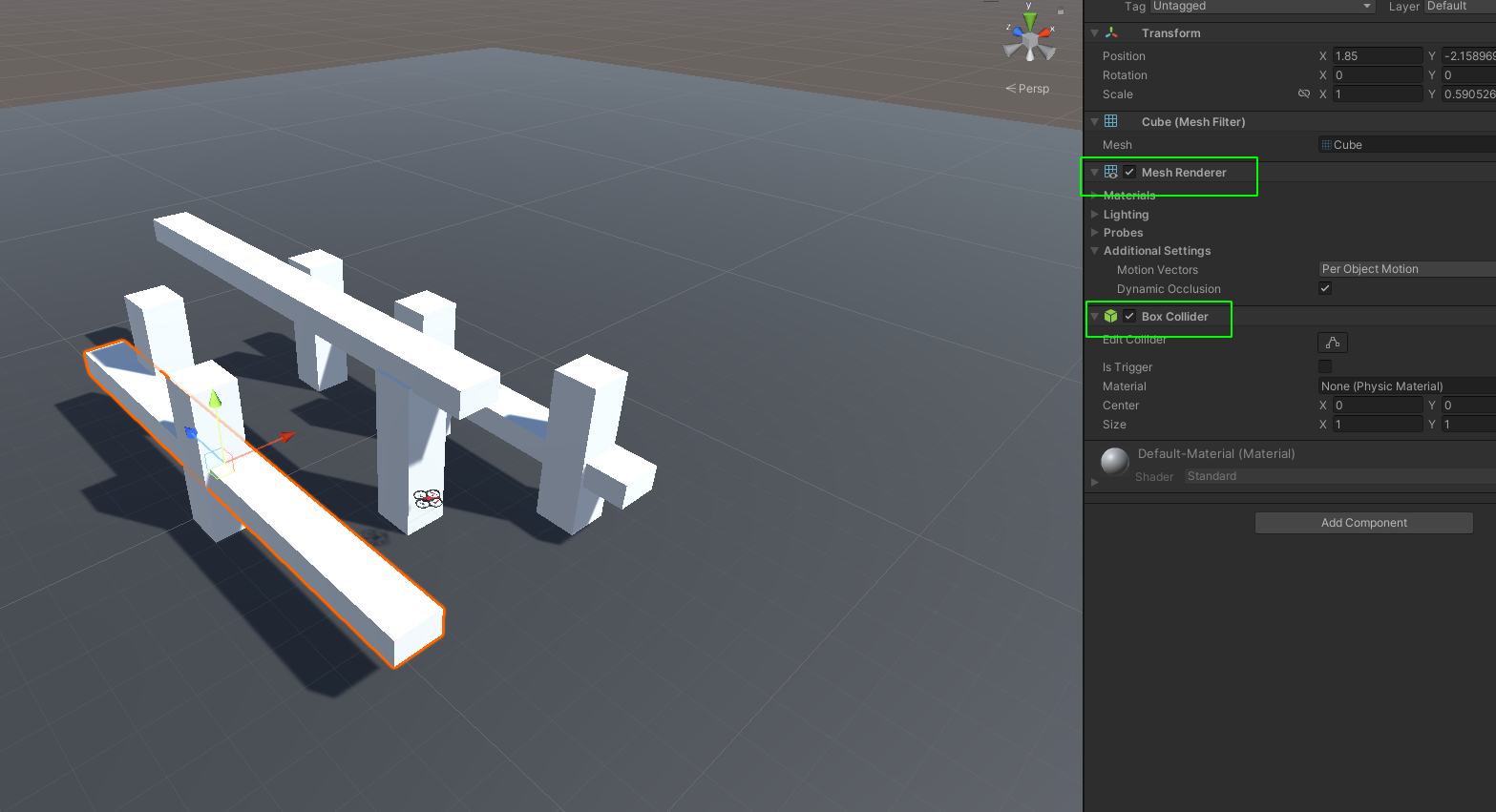
地图中的物体,一般具有renderer组件和collider组件。前者提供物体的外观,后者提供碰撞检测。
只有renderer的物体,具有外观,但是不能反射产生雷达点云。 只有collider的物体,外观隐形,但是可以产生雷达点云。