This is the PyTorch implementation for our paper "dO: A differentiable engine for Deep Lens design of computational imaging systems".
dO: A differentiable engine for Deep Lens design of computational imaging systems
Congli Wang,
Ni Chen, and
Wolfgang Heidrich
King Abdullah University of Science and Technology (KAUST)
IEEE Transactions on Computational Imaging 2022

We implemented in PyTorch a memory- and computation-efficient differentiable ray tracing system for optical designs, for design applications in freeform, Deep Lens, metrology, and more.
- Initial code release.
-
autodiff.py: Demo of thedOengine. -
backprop_compare.py: Example on comparison between back-propagation and adjoint back-propagation. -
caustic_pyramid.py: Example on freeform caustic design.
| Target irradiance | Optimized irradiance | Optimized phase map |
|---|---|---|
 |
 |
 |
-
misalignment_point.py: Example on misalignment back-engineering, using real measurements.
| Model (initial) | Measurement | Model (optimized) |
|---|---|---|
 |
 |
 |
-
nikon.py: Example on optimizing a Nikon design. -
render_image.py: Example on rendering a single image from a design.
 |
|---|
-
render_psf.py: Example on rendering PSFs of varying fields and depths for a design.
 |
 |
|---|---|
 |
 |
-
sanity_check.py: Example on Zemax versusdOfor sanity check.dOZemax 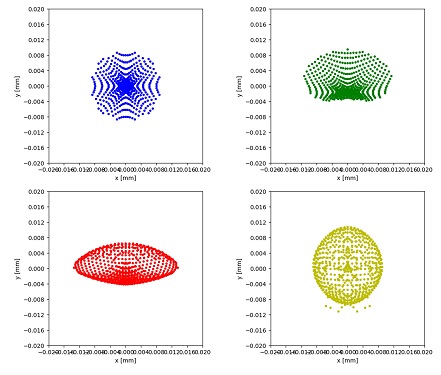
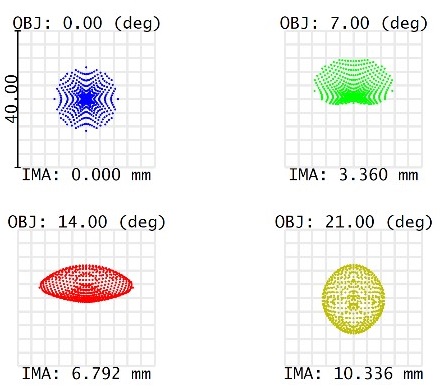
-
spherical_aberration.py: Example on optimizing spherical aberration. -
end2end_edof_backward_tracing.py: Example on end-to-end learning of wavefront coding, for extended depth of field applications, using backward ray tracing.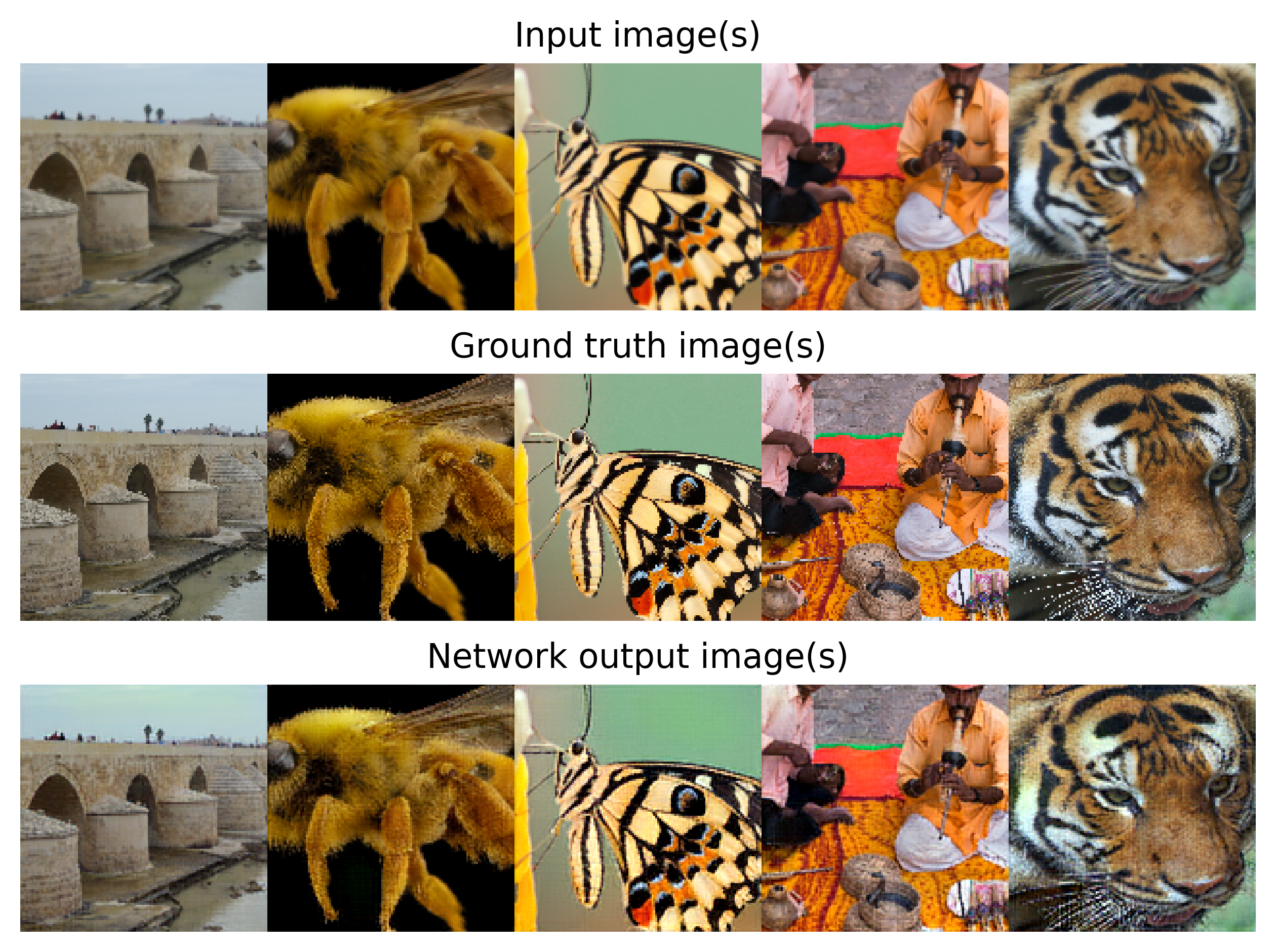
-
Code cleanups and add comments.
-
File I/O with Zemax.
-
Mini GUI for easy operations.



Though no GPUs are required, for speed's sake it is better to run the engine on a GPU.
Install the required Python packages:
pip install -r requirements.txtExamples are in the ./examples folder, and running some of the examples may require installing additional Python packages. Just follow the terminal hints, for example install the following:
pip install imageio opencv-python scikit-imageIn case Python cannot find the path to dO, run the example scripts in the ./examples directory, for example:
cd <directory_of_this_repository>/examples
python3 misalignment_point.py- General optical design/metrology or Deep Lens designs are parameter-optimization problems, and learning-based methods (e.g. with back-propagation) can be employed as solvers. This requires the optical modeling to be numerically derivative-aware (i.e. differentiable).
- However, straightforward differentiable ray tracing with auto-diff (AD) is not memory/computation-efficient.
- Differentiable ray-surface intersections requires a differentiable root-finding solver, which is typically iterative, like Newton's solver. Straightforward implementation is inefficient in both memory and computation. However, our paper makes an observation that, the status of the solver's iterations is irrelevant to the final solution -- That means, a differentiable root-finding solver can be smartly implemented as: (1) Find the optimal solution without AD (e.g. in block
with torch.no_grad()in PyTorch), and (2) Re-engage AD to the solution found. This leads to great reduce in memory consumption, scaling up the system differentiability to large number of parameters or rays.
 |
|---|
| Figure: Comparison between the straightforward and our proposed differentiable ray-surface intersection methods for freeform surface optimization. Our method reduces the required memory by about 6 times. |
-
When optimizing a custom merit function for image-based applications appended with a neural network, e.g. in Deep Lens designs, the training (or, back-propagation) can be split into two parts:
- (Front-end) Optical design parameter optimization (training).
- (Back-end) Neural network post-processing training.
This de-coupling resembles the checkpointing technology in deep learning, and hence reducing the memory-hunger issue when tracing many number of rays.
 |
|---|
 |
| Figure: Adjoint back-propagation (Adjoint BP) and the corresponding comparison against back-propagation (BP). Our implementation enables the scale up to many millions of rays while the conventional cannot. |
 |
|---|
| Figure: Using dO the differentiable ray tracing system, we show the feasibility of advanced optical designs. |
Towards self-calibrated lens metrology by differentiable refractive deflectometry
Congli Wang,
Ni Chen, and
Wolfgang Heidrich
King Abdullah University of Science and Technology (KAUST)
OSA Optics Express 2021
GitHub: https://github.com/vccimaging/DiffDeflectometry.
@article{wang2022dO,
title={{dO: A differentiable engine for Deep Lens design of computational imaging systems}},
author={Wang, Congli and Chen, Ni and Heidrich, Wolfgang},
journal={IEEE Transactions on Computational Imaging},
year={2022},
volume={8},
number={},
pages={905-916},
doi={10.1109/TCI.2022.3212837},
publisher={IEEE}
}Please either open an issue, or contact Congli Wang congli.wang@kaust.edu.sa for questions.