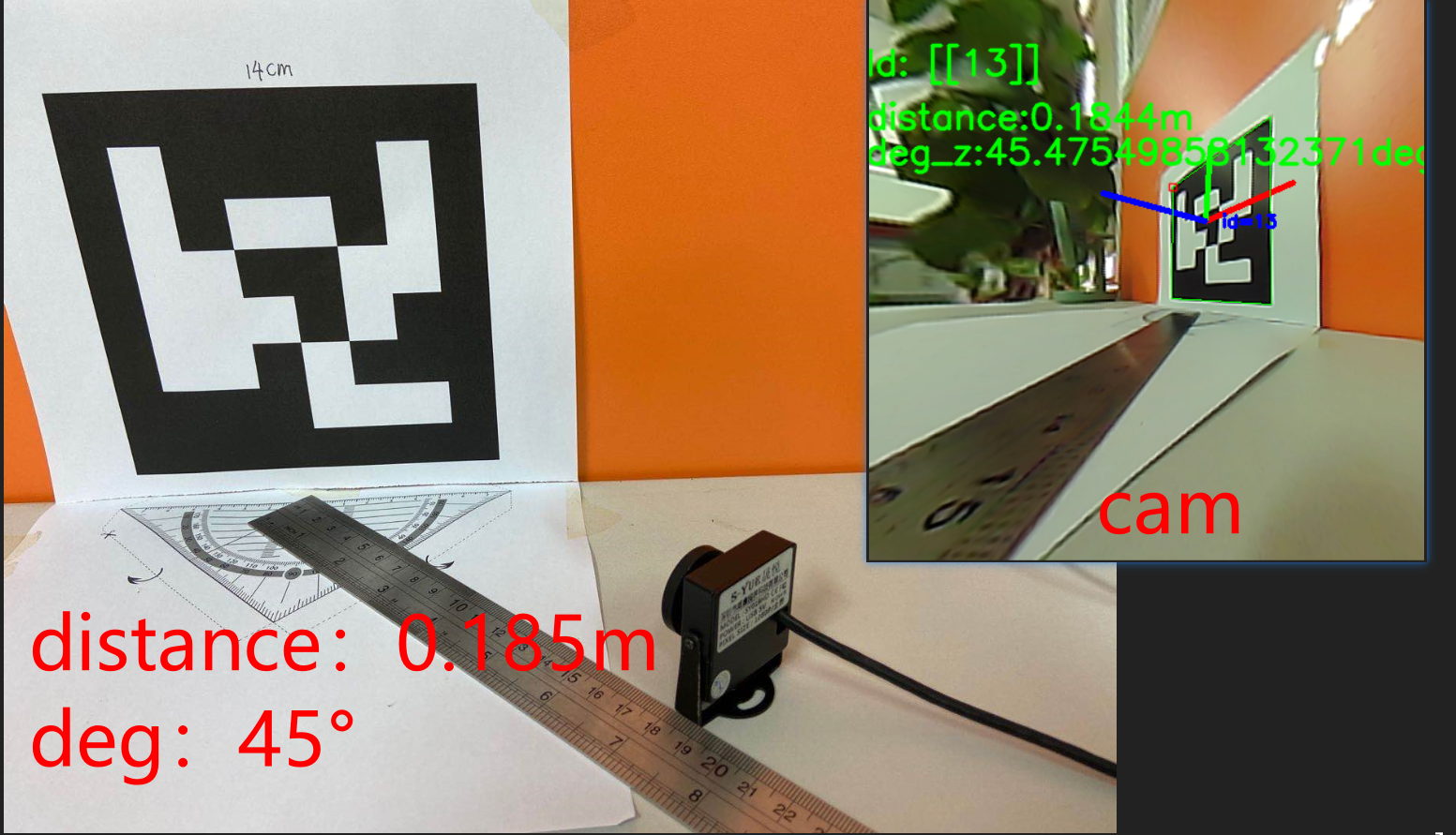
利用aruco.estimatePoseSingleMarkers()函数返回找到的aurco标签的rvec旋转矩阵、tvec位移矩阵进行换算,找出aurco相对于相机cam的距离和角度,实现利用aurco进行定位
Use the aruco.estimatePoseSingleMarkers() function to return the rvec rotation matrix and tvec displacement matrix of the found aurco label for conversion, find out the distance and angle of aurco relative to the camera cam, and realize the use of aurco for positioning

项目地址:https://github.com/ZengWenJian123/aruco_positioning_2D 博客地址:https://blog.dgut.top/2020/08/19/aruco-2d/ csdn:https://blog.csdn.net/dgut_guangdian/article/details/108093643