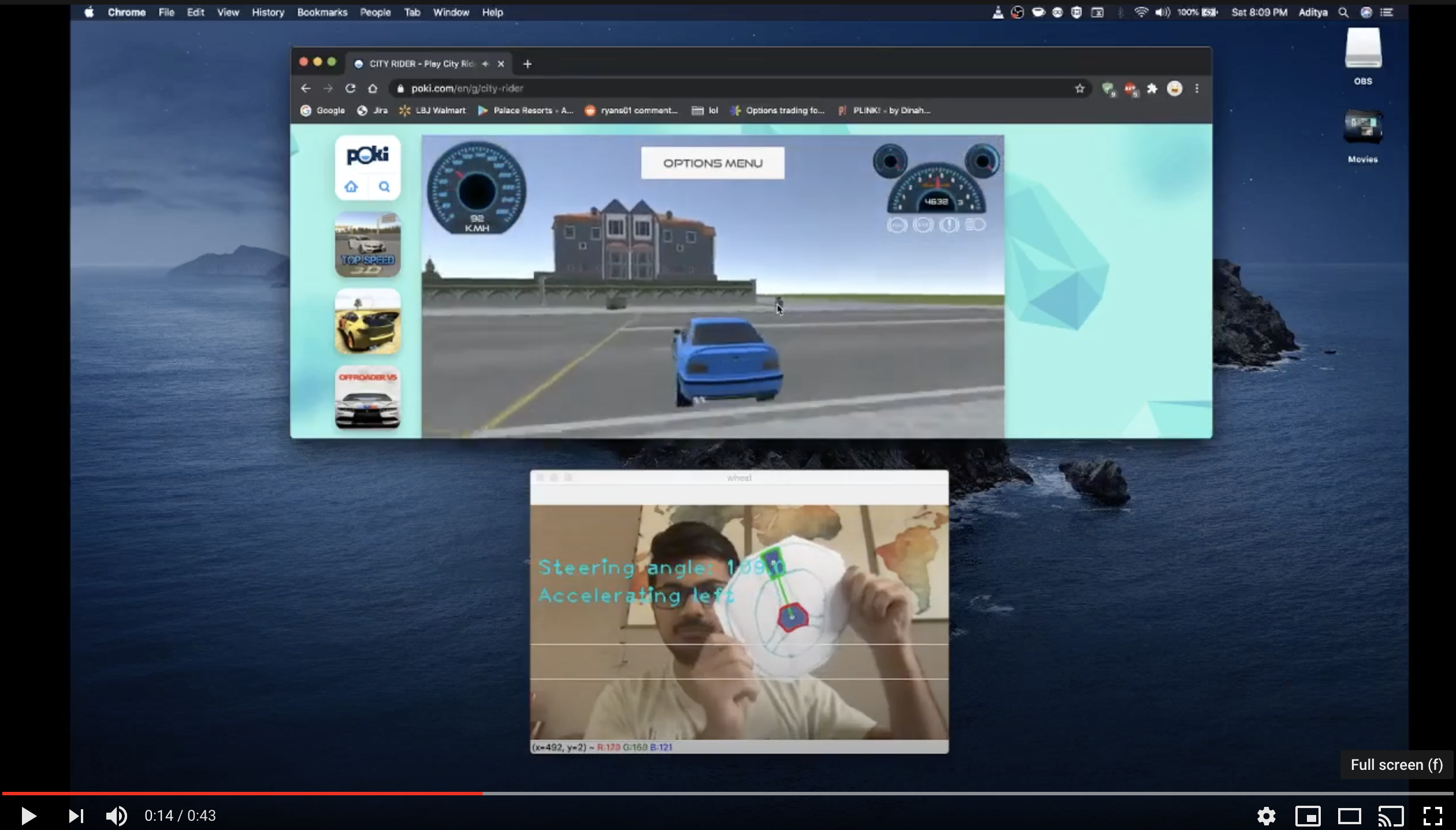
- Use OpenCV to detect contours and filters out the blue color on the steering wheel (See Sample steering wheel)
- It then gets the slope of the line formed using the center of the wheel and the top of the wheel and uses that to determine the steering input
- Also, the position center of the wheel is responsible for braking and accelerating
- Watch the video
pip install -r requirements.txtpython main.py