This in an implementation of the Loop&Zhang image rectification algorithm, done as an assigment for the course Computer Vision, at University of Granada.
The implementation is made in C++, using OpenCV as a key element of the project. The code follows a functional pattern, mainly implemented in the util.cpp file.
The algorithm was proposed by Loop&Zhang, while the implementations is done by Antonio Álvarez (@analca3) and Alejandro García (@agarciamontoro).
The code in this repository tries to rectify pairs of stereoschopic images using the Loop&Zhang algorithm, which uses a completely geometric process to obtain the homographies and does not need to know camera-related stuff.
You just need to take two images of the same static scene from two different points of view and the algorithm implemented will rectify them in order to allign its epipolar geometries.
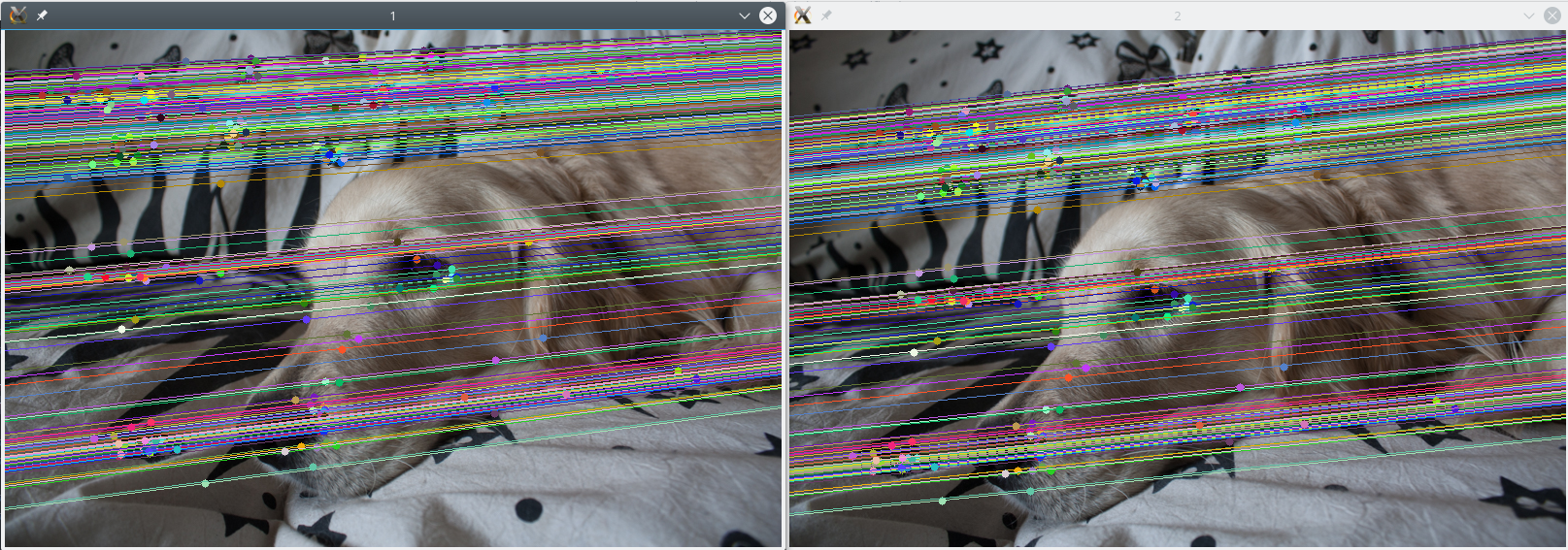
Sure! Here you have a pair of Alejandro's cute dog, Lola, whose natural calm is perfect to act as a static scene:
Here you can see the original pair of photos with its epipolar geometry:
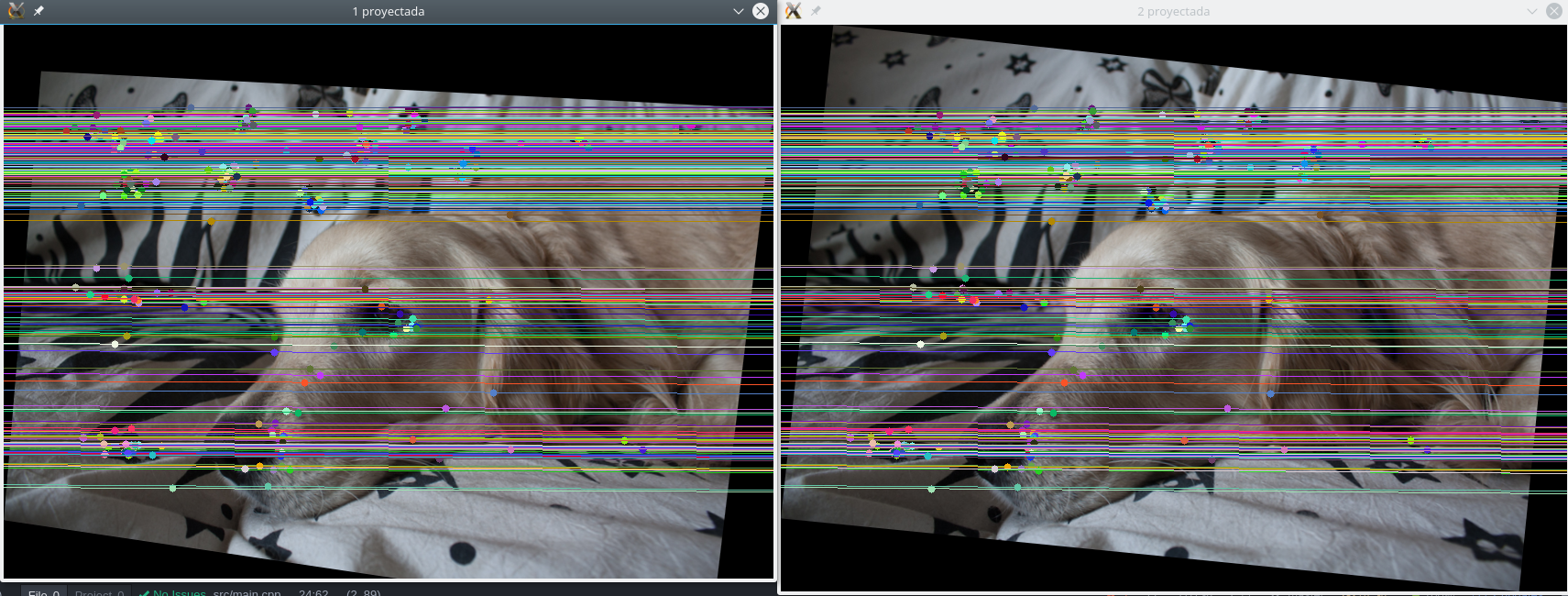
And the result after apply the algorithm:
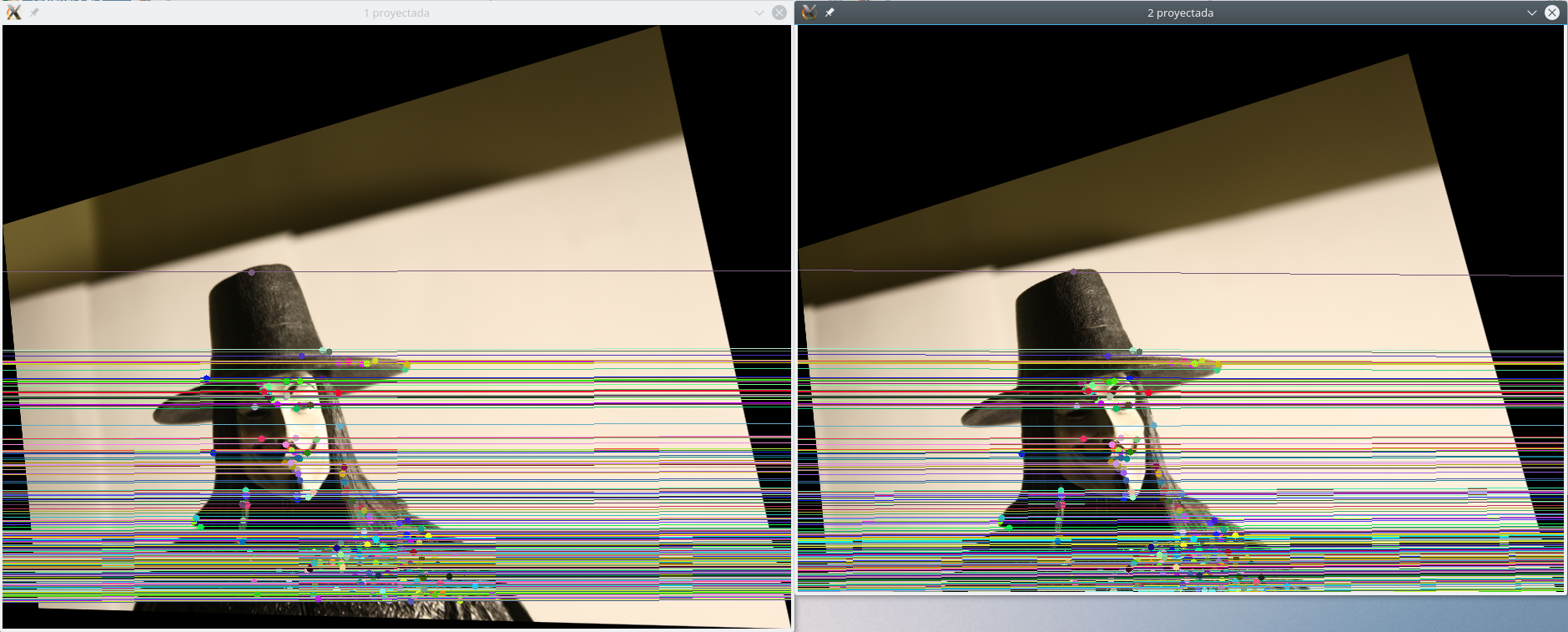
Another example, in which the result is quite more impressive, is the following. The original pairs of images from a V for Vendetta toy; the epipolar geometries of the images are quite different:
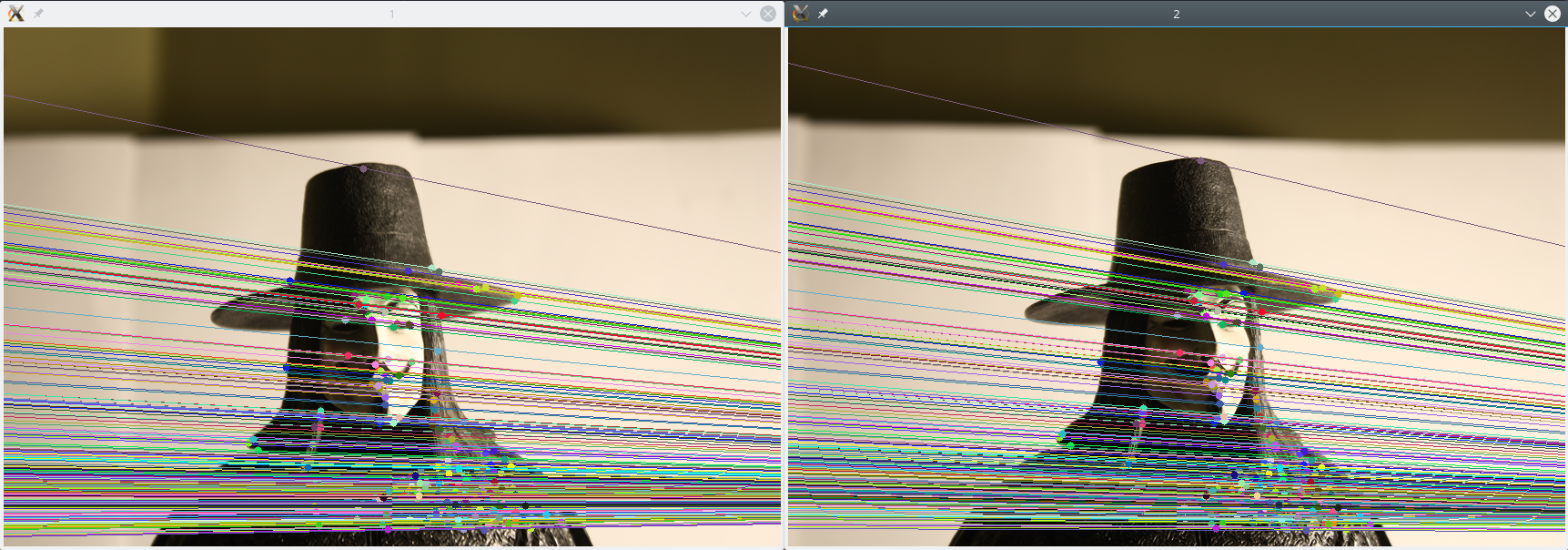
And the result after have applied the algorithm: