The goals / steps of this project are the following:
- Step 0: Make a list of image to read in.
- step 1: Explore the Training Data.
- Visualize Some Training Data
- Define draw rectangle function and show mamual rectangle onto image
- Template Matching
- Histograms of Color
- Explore Color Spaces
- Spatial Binning of Color
- Step 2: Define Method to Get Histogram of Oriented Gradients (HOG) Features.
- Define get hog features function & Visualize HOG on example image
- Extract HOG Features from an Array of Car and Non-Car Images
- Combine and Normalize Features
- Color Classify
- HOG Classify
- Color and Hog Feature Combined Function
- Extract Features
- Step 3: Train Classifier and Save Parameters.
- Train classifer
- Save model parameters
- Restore model parameters
- Step 4: Method for Using Classifier to Detect Cars in an Image.
- Dectet car position
- Search object and classify
- Hog Sub-sampling Window Search
- Show All Potential Search Areas
- Heat map Filtering
- Step 5: Pipeline for Processing Video Frames
- Define Vechile dectect Class
- Show Test Results
- Test on Videos
- Stemp 6: Discussion.
# -*- coding=UTF-8 -*-
import numpy as np
import cv2
import sklearn
import skimage
import glob
import os
import time
import math
import random
import pickle
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
from skimage.feature import hog
from sklearn.svm import LinearSVC
from scipy.ndimage.measurements import label
from sklearn.preprocessing import StandardScaler
# NOTE: : the next import is only valid for scikit-learn >= 0.18 use:
from sklearn.model_selection import train_test_split
# for scikit-learn version <= 0.17
#from sklearn.cross_validation import train_test_split
from moviepy.editor import VideoFileClip
from IPython.display import HTML
from mpl_toolkits.mplot3d import Axes3D
print('OK!')OK!
car_images = glob.glob('training_dataset/vehicles/**/*.png')
noncar_images = glob.glob('training_dataset/non-vehicles/**/*.png')
car_images_num = len(car_images)
noncar_images_num = len(noncar_images)
print("Vehicles images = ", car_images_num)
print("Non Vehicles images = " , noncar_images_num)Vehicles images = 8792
Non Vehicles images = 8968
def show_images(images, lable=None, cols=3, figsize=(14, 14), cmap=None, ticksshow=False):
"""
Show images
Arguments:
iamges: source images array like/list. or image files list. Here uses iterate
label: the image relevant label, list or array like
cols: show images per colum
cmap: color map
ticksshow: bool, whether show ticks
"""
rows = (len(images)+cols-1)//cols
# if cols >= 8:
# plt.figure(figsize=(14, 8))
# else:
# plt.figure(figsize=(14,14))
plt.figure(figsize=figsize)
for i, image in enumerate(images):
if isinstance(image, str): # or (type(image)== str) check the image type, if == str ,then read it
image = mpimg.imread(image)
plt.subplot(rows, cols, i+1)
# use gray scale color map if there is only one channel
showimage_shape = image.shape
if len(showimage_shape) == 2:
cmap = "gray"
elif showimage_shape[2] == 1:
image = image[:,:,0]
cmap = "gray"
plt.imshow(image, cmap=cmap)
if lable != None and lable[i] != None:
plt.title(lable[i],fontsize=14)
if ticksshow != True:
plt.xticks([])
plt.yticks([])
plt.tight_layout(pad=0, h_pad=0, w_pad=0)
plt.show()imgs_32 = random.sample(car_images, 32)
show_images(imgs_32, lable=None, cols=8, figsize=(14,8),cmap=None, ticksshow=False)
# Here is your draw_boxes function from the 'Manual Vehicle Detection' lesson
def draw_boxes(img, bboxes, color=(0, 0, 255), thick=3):
"""
Draw bounding box
Arguments:
img: source image array like/list. or image files list
bboxes: bounding box diagonal coordinates
color: one color or random color if "random"
thick: line Diagonal coordinates
"""
# Make a copy of the image
if isinstance(img, str): # check che type of img, if equal str, read it
img = mpimg.imread(img)
imcopy = np.copy(img)
random_color = False
# Iterate through the bounding boxes
for bbox in bboxes:
if color == 'random' or random_color:
color = (np.random.randint(0,255), np.random.randint(0,255), np.random.randint(0,255))
random_color = True
# Draw a rectangle given bbox coordinates
cv2.rectangle(imcopy, bbox[0], bbox[1], color, thick)
# Return the image copy with boxes drawn
return imcopy
print('OK')OK
image = 'test_images/test4.jpg'
# Here are the bounding boxes I used
bboxes = [((809, 411), (948, 496)), ((1034, 407), (1248, 501))]
result = draw_boxes(image, bboxes,"random")
show_images([image, result],['Original Image','Vehicle boxed Image'],cols = 2)
-
Template matching take in an image and a list of templates, return a list of the beat fit location for each template in the image.
OpenCV provides with the handy function
cv2.matchTemplate()to search the image, andcv2.minMaxLoc()to extract the location of the best match.You can choose between "squared difference" or "correlation" methods in using cv2.matchTemplate(), but keep in mind with squared differences you need to locate the global minimum difference to find a match, while for correlation, you're looking for a global maximum.
image = mpimg.imread('tempmatch_images/bbox-example-image.jpg')
templist = ['tempmatch_images/cutout1.jpg', 'tempmatch_images/cutout2.jpg', 'tempmatch_images/cutout3.jpg',
'tempmatch_images/cutout4.jpg', 'tempmatch_images/cutout5.jpg', 'tempmatch_images/cutout6.jpg']
show_images(templist,len(templist)*['Template'],cols = len(templist))
# Define a function that takes an image and a list of templates as inputs
# then searches the image and returns the a list of bounding boxes
# for matched templates
def find_matches(img, template_list, method=cv2.TM_CCORR_NORMED):
"""
Using template match the image to find object
Arguments:
img: source image array like. or image file name
template_list: template list
method: method
"""
if isinstance(img, str):
img = mpimg.imread(img)
# Define an empty list to take bbox coords
bbox_list = []
# Iterate through template list
for temp in template_list:
if isinstance(temp, str):
tmp = mpimg.imread(temp)
# Use cv2.matchTemplate() to search the image
result = cv2.matchTemplate(img, tmp, method)
# Use cv2.minMaxLoc() to extract the location of the best match
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result)
# Determine a bounding box for the match
w, h = (tmp.shape[1], tmp.shape[0])
if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:
top_left = min_loc
else:
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
# Append bbox position to list
bbox_list.append((top_left, bottom_right))
# Return the list of bounding boxes
return bbox_listmethod = cv2.TM_CCORR_NORMED
# Define matching method
# Other options include: cv2.TM_CCORR_NORMED', 'cv2.TM_CCOEFF', 'cv2.TM_CCORR','cv2.TM_SQDIFF', 'cv2.TM_SQDIFF_NORMED'
bboxes = find_matches(image, templist)
result = draw_boxes(image, bboxes)
show_images([image,result], ['Original Image', 'matched Image'], cols = 2)
Some code for this method was mostly duplicated from course lesson material.
Histograms of color statistic raw pixel intensites in one color sapce.
With np.histogram(), we don't actually have to specify the number of bins or the range, but here I've arbitrarily chosen 32 bins and specified range=(0, 256) in order to get orderly bin sizes. np.histogram() returns a tuple of two arrays. In this case, for example, rhist[0] contains the counts in each of the bins and rhist[1] contains the bin edges (so it is one element longer than rhist[0]).
img_cutout = "./tempmatch_images/cutout1.jpg"
show_images([img_cutout],['Original Image'], figsize=(12,12)) # NOTO: Using [img_cutout] instead of img_cutout
# Define a function to compute color histogram features
def color_hist(img, nbins=32, bins_range=(0, 256), colorspace='RGB'):
"""
Compute color histogram
Arguments:
img: sourece image array like or image file name
nbins: int, it defines the number of equal-width bins in the given range.
bins_range: The lower and upper range of the bins
colorspace: color space
"""
if isinstance(img, str): # check che type of img, if equal str, read it
img = mpimg.imread(img)
if colorspace != 'RGB':
if colorspace == 'HSV':
dst_img = cv2.cvtColor(img, cv2.COLOR_RGB2HSV)
elif colorspace == 'LUV':
dst_img = cv2.cvtColor(img, cv2.COLOR_RGB2LUV)
elif colorspace == 'HLS':
dst_img = cv2.cvtColor(img, cv2.COLOR_RGB2HLS)
elif colorspace == 'YUV':
dst_img = cv2.cvtColor(img, cv2.COLOR_RGB2YUV)
elif colorspace == 'YCrCb':
dst_img = cv2.cvtColor(img, cv2.COLOR_RGB2YCrCb)
else:
dst_img = np.copy(img)
# Compute the histogram of the RGB channels separately
hist_0 = np.histogram(dst_img[:,:,0], bins=nbins, range=bins_range)
hist_1 = np.histogram(dst_img[:,:,1], bins=nbins, range=bins_range)
hist_2 = np.histogram(dst_img[:,:,2], bins=nbins, range=bins_range)
# Generating bin centers
bin_edges = hist_0[1]
bin_centers = (bin_edges[1:] + bin_edges[0:len(bin_edges)-1])/2
# Concatenate the histograms into a single feature vector
hist_features = np.concatenate((hist_0[0], hist_1[0], hist_2[0]))
# Return the individual histograms, bin_centers and feature vector
return hist_0, hist_1, hist_2, bin_centers, hist_features
rh, gh, bh, bincen, feature_vec = color_hist(img_cutout, 32, (0, 256), 'RGB')
# Plot a figure with all three bar charts
if rh is not None:
fig = plt.figure(figsize=(12,3))
plt.subplot(131)
plt.bar(bincen, rh[0])
plt.xlim(0, 256)
plt.title('R Histogram')
plt.subplot(132)
plt.bar(bincen, gh[0])
plt.xlim(0, 256)
plt.title('G Histogram')
plt.subplot(133)
plt.bar(bincen, bh[0])
plt.xlim(0, 256)
plt.title('B Histogram')
fig.tight_layout()

The code for this method was mostly duplicated from course lesson material.
def plot3d(pixels, colors_rgb, axis_labels=list("RGB"), axis_limits=((0, 255), (0, 255), (0, 255))):
"""Plot pixels in 3D."""
# Create figure and 3D axes
fig = plt.figure(figsize=(8, 8))
ax = Axes3D(fig)
# Set axis limits
ax.set_xlim(*axis_limits[0])
ax.set_ylim(*axis_limits[1])
ax.set_zlim(*axis_limits[2])
# Set axis labels and sizes
ax.tick_params(axis='both', which='major', labelsize=14, pad=8)
ax.set_xlabel(axis_labels[0], fontsize=16, labelpad=16)
ax.set_ylabel(axis_labels[1], fontsize=16, labelpad=16)
ax.set_zlabel(axis_labels[2], fontsize=16, labelpad=16)
# Plot pixel values with colors given in colors_rgb
ax.scatter(
pixels[:, :, 0].ravel(),
pixels[:, :, 1].ravel(),
pixels[:, :, 2].ravel(),
c=colors_rgb.reshape((-1, 3)), edgecolors='none')
return ax # return Axes3D object for further manipulation
# Read a color image
img = mpimg.imread("./tempmatch_images/bbox-example-image.jpg")
# Select a small fraction of pixels to plot by subsampling it
scale = max(img.shape[0], img.shape[1], 64) / 64 # at most 64 rows and columns
img_small = cv2.resize(img, (np.int(img.shape[1] / scale), np.int(img.shape[0] / scale)), interpolation=cv2.INTER_NEAREST)
# Convert subsampled image to desired color space(s)
img_small_RGB = np.copy(img_small) # OpenCV uses BGR, matplotlib likes RGB
img_small_HSV = cv2.cvtColor(img_small, cv2.COLOR_RGB2HSV)
img_small_rgb = img_small_RGB / 255. # scaled to [0, 1], only for plotting
show_images([img], ['Original Image'], figsize=(24, 24))
# Plot and show
plot3d(img_small_RGB, img_small_rgb)
plt.show()
plot3d(img_small_HSV, img_small_rgb, axis_labels=list("HSV"))
plt.show()


-
Some code for this method was mostly duplicated from course lesson material.
# Define a function to compute color histogram features
# Pass the color_space flag as 3-letter all caps string
# like 'HSV' or 'LUV' etc.
def bin_spatial(img, color_space='RGB', size=(32, 32)):
# check che type of img, if equal str, read it
if isinstance(img, str):
img = mpimg.imread(img)
# Convert image to new color space (if specified)
if color_space != 'RGB':
if color_space == 'HSV':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2HSV)
elif color_space == 'LUV':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2LUV)
elif color_space == 'HLS':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2HLS)
elif color_space == 'YUV':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2YUV)
elif color_space == 'YCrCb':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2YCrCb)
else: feature_image = np.copy(img)
# Use cv2.resize().ravel() to create the feature vector
features = cv2.resize(feature_image, size).ravel()
# Return the feature vector
return features
# Read in an image
# You can also read cutout2, 3, 4 etc. to see other examples
image = mpimg.imread('tempmatch_images/cutout1.jpg')
show_images([image],['Original Image'], figsize=(12,12))
feature_vec = bin_spatial(image, color_space='RGB', size=(32, 32))
# Plot features
plt.plot(feature_vec)
plt.title('Spatially Binned Features')
Text(0.5,1,'Spatially Binned Features')

This method was duplicated from lesson materials
# Define HOG parameters
orient = 11
pix_per_cell = 16
cell_per_block = 2
vis=False
feature_vec=True
def get_hog_features(img, orient=orient, pix_per_cell=pix_per_cell, cell_per_block=cell_per_block,
vis=vis, feature_vec=feature_vec):
"""
Extract one image HOG feature
Arguments:
img: source images
orient: split 360˚ into orient parts
pix_per_cell: pixels per cell
cell_per_block: cells per block
vis: bool, whether visualize the result
feature_vec: bool, whether tansfer hog features into vector
"""
# Call with two outputs if vis==True
if vis == True:
features, hog_image = hog(img, orientations=orient,
pixels_per_cell=(pix_per_cell, pix_per_cell),
cells_per_block=(cell_per_block, cell_per_block),
transform_sqrt=False,
visualise=True, feature_vector=feature_vec)
return features, hog_image
# Otherwise call with one output
else:
features = hog(img, orientations=orient,
pixels_per_cell=(pix_per_cell, pix_per_cell),
cells_per_block=(cell_per_block, cell_per_block),
transform_sqrt=False,
visualise=False, feature_vector=feature_vec)
return featuresdef rgb2gray(img):
# check che type of img, if equal str, read it
if isinstance(img, str):
img = mpimg.imread(img)
return cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
car_imgs_4 = random.sample(car_images, 4)
gray_car_image = list(map(rgb2gray, car_imgs_4))
res = list(map(lambda img:get_hog_features(img,vis=True), gray_car_image))
car_features = [s[0] for s in res]
car_hog_image = [s[1] for s in res]
show_images(car_imgs_4, 4 * ['Example Car Image'], cols = 4, figsize=(12,12))
show_images(car_hog_image,4 * ['HOG Visualization'], cols = 4, figsize=(12,12)) 

-
I am almost ready to train a classifier, but first, as in any machine learning application, we need to normalize your data. Python's
sklearnpackage provides you with theStandardScaler()method to accomplish this task. To read more about how you can choose different normalizations with thetandardScaler()method, check out the documentation.To apply
StandardScaler()we need to first have our data in the right format, as a numpy array where each row is a single feature vector.
# Define a function to extract features from a list of images
# Have this function call bin_spatial() and color_hist()
def extract_features_with_spatial_histogram(imgs, cspace='RGB', spatial_size=(32, 32), hist_bins=32,
hist_range=(0, 256)):
"""
Extract spatial and histogram feature of series images
Arguments:
imgs: source images array like. or image files name
cspace: color space HSV, RGB, HLS, YUV, YCrCb
orient: split 360˚ into orient parts
pix_per_cell: pixels per cell
cell_per_block: cells per block
hog_channel: which channel of image to extract HOG features
"""
# Create a list to append feature vectors to
features = []
# Iterate through the list of images
for file in imgs:
# Read in each one by one
if isinstance(file, str):
image = mpimg.imread(file)
else:
image = np.copy(file)
# apply color conversion if other than 'RGB'
if cspace != 'RGB':
if cspace == 'HSV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2HSV)
elif cspace == 'LUV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2LUV)
elif cspace == 'HLS':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2HLS)
elif cspace == 'YUV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2YUV)
else:
feature_image = np.copy(image)
# Apply bin_spatial() to get spatial color features
spatial_features = bin_spatial(feature_image, size=spatial_size)
# Apply color_hist() also with a color space option now, NOTE: return (4,) tuple
hist_features = color_hist(feature_image, nbins=hist_bins, bins_range=hist_range)
# Append the new feature vector to the features list
features.append(np.concatenate((spatial_features, hist_features[4])))
# Return list of feature vectors
return features
car_features = extract_features_with_spatial_histogram(car_images)
notcar_features = extract_features_with_spatial_histogram(noncar_images)
if len(car_features) > 0:
# Create an array stack of feature vectors
X = np.vstack((car_features, notcar_features)).astype(np.float64)
# Fit a per-column scaler
X_scaler = StandardScaler().fit(X)
# Apply the scaler to X
scaled_X = X_scaler.transform(X)
car_ind = np.random.randint(0, len(car_images))
# Plot an example of raw and scaled features
fig = plt.figure(figsize=(12,4))
plt.subplot(131)
plt.imshow(mpimg.imread(car_images[car_ind]))
plt.title('Original Image')
plt.subplot(132)
plt.plot(X[car_ind])
plt.title('Raw Features')
plt.subplot(133)
plt.plot(scaled_X[car_ind])
plt.title('Normalized Features')
fig.tight_layout()
else:
print('Your function only returns empty feature vectors...')
# Create an array stack of feature vectors
X = np.vstack((car_features, notcar_features)).astype(np.float64)
# Define the labels vector
y = np.hstack((np.ones(len(car_features)), np.zeros(len(notcar_features))))
# Split up data into randomized training and test sets
rand_state = np.random.randint(0, 100)
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=rand_state)
# Fit a per-column scaler only on the training data
X_scaler = StandardScaler().fit(X_train)
# Apply the scaler to X_train and X_test
X_train = X_scaler.transform(X_train)
X_test = X_scaler.transform(X_test)
print('Using spatial binning of:', 32, 'and', 32,'histogram bins')
print('Feature vector length:', len(X_train[0]))
# Use a linear SVC
svc = LinearSVC()
# Check the training time for the SVC
t=time.time()
svc.fit(X_train, y_train)
t2 = time.time()
print(round(t2-t, 2), 'Seconds to train SVC...')
# Check the score of the SVC
print('Test Accuracy of SVC = ', round(svc.score(X_test, y_test), 4))
# Check the prediction time for a single sample
t=time.time()
n_predict = 10
print('My SVC predicts: ', svc.predict(X_test[0:n_predict]))
print('For these',n_predict, 'labels: ', y_test[0:n_predict])
t2 = time.time()
print(round(t2-t, 5), 'Seconds to predict', n_predict,'labels with SVC')Using spatial binning of: 32 and 32 histogram bins
Feature vector length: 3168
33.4 Seconds to train SVC...
Test Accuracy of SVC = 0.9147
My SVC predicts: [ 1. 1. 1. 1. 0. 0. 1. 1. 0. 1.]
For these 10 labels: [ 1. 1. 1. 1. 1. 0. 1. 1. 0. 1.]
0.00119 Seconds to predict 10 labels with SVC
-
The code for this method was mostly duplicated from course lesson material.
# Define a function to extract features from a list of image locations
# This function could also be used to call bin_spatial() and color_hist() (as in the lessons) to extract
# flattened spatial color features and color histogram features and combine them all (making use of StandardScaler)
# to be used together for classification
def extract_HOG_features(imgs, cspace='RGB', orient=9, pix_per_cell=8, cell_per_block=2, hog_channel=0):
"""
Extract HOG feature of series images
Arguments:
imgs: source images array like. or image files name
cspace: color space HSV, RGB, HLS, YUV, YCrCb
orient: split 360˚ into orient parts
pix_per_cell: pixels per cell
cell_per_block: cells per block
hog_channel: which channel of image to extract HOG features
"""
# Create a list to append feature vectors
features = []
# Iterate in each image one by one
for file in imgs:
# Read in each image one by one
image = mpimg.imread(file)
# Apply color conversion if other than 'RGB'
if cspace != 'RGB':
if cspace == 'HSV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2HSV)
elif cspace == 'LUV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2LUV)
elif cspace == 'HLS':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2HLS)
elif cspace == 'YUV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2YUV)
elif cspace == 'YCrCb':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2YCrCb)
else:
feature_image = np.copy(image)
# Call get_hog_features() with vis=False, feature_vec=True
if hog_channel == 'ALL':
hog_features = []
for channel in range(feature_image.shape[2]):
hog_features.append(get_hog_features(feature_image[:,:,channel], orient, pix_per_cell,
cell_per_block, vis=False, feature_vec=True))
hog_features = np.ravel(hog_features)
else:
hog_features = get_hog_features(feature_image[:,:,hog_channel], orient, pix_per_cell,
cell_per_block, vis=False, feature_vec=True)
# Append the new feature vector to the features list
features.append(hog_features)
# Return list of images feature vecotors
return features
### TODO: Tweak these parameters and see how the results change.
colorspace = 'RGB' # Can be RGB, HSV, LUV, HLS, YUV, YCrCb
orient = 9
pix_per_cell = 8
cell_per_block = 2
hog_channel = 0 # Can be 0, 1, 2, or "ALL"
t=time.time()
car_features = extract_HOG_features(car_images, cspace=colorspace, orient=orient, pix_per_cell=pix_per_cell,
cell_per_block=cell_per_block, hog_channel=hog_channel)
notcar_features = extract_HOG_features(noncar_images, cspace=colorspace, orient=orient, pix_per_cell=pix_per_cell,
cell_per_block=cell_per_block,hog_channel=hog_channel)
t2 = time.time()
print(round(t2-t, 2), 'Seconds to extract HOG features...')
# Create an array stack of feature vectors
X = np.vstack((car_features, notcar_features)).astype(np.float64)
# Define the labels vector
y = np.hstack((np.ones(len(car_features)), np.zeros(len(notcar_features))))
# Split up data into randomized training and test sets
rand_state = np.random.randint(0, 100)
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=rand_state)
# Fit a per-column scaler
X_scaler = StandardScaler().fit(X_train)
# Apply the scaler to X
X_train = X_scaler.transform(X_train)
X_test = X_scaler.transform(X_test)
print('Using:',orient,'orientations',pix_per_cell,'pixels per cell and', cell_per_block,'cells per block')
print('Feature vector length:', len(X_train[0]))
# Use a linear SVC
svc = LinearSVC()
# Check the training time for the SVC
t=time.time()
svc.fit(X_train, y_train)
t2 = time.time()
print(round(t2-t, 2), 'Seconds to train SVC...')
# Check the score of the SVC
print('Test Accuracy of SVC = ', round(svc.score(X_test, y_test), 4))
# Check the prediction time for a single sample
t=time.time()
n_predict = 10
print('My SVC predicts: ', svc.predict(X_test[0:n_predict]))
print('For these',n_predict, 'labels: ', y_test[0:n_predict])
t2 = time.time()
print(round(t2-t, 5), 'Seconds to predict', n_predict,'labels with SVC')19.98 Seconds to extract HOG features...
Using: 9 orientations 8 pixels per cell and 2 cells per block
Feature vector length: 1764
7.59 Seconds to train SVC...
Test Accuracy of SVC = 0.9431
My SVC predicts: [ 1. 0. 1. 1. 0. 1. 1. 0. 1. 1.]
For these 10 labels: [ 1. 0. 1. 1. 0. 1. 0. 0. 1. 1.]
0.00117 Seconds to predict 10 labels with SVC
-
Combine color and hog features to train classifer
# Define a function to extract features from a list of images
# Have this function call bin_spatial() and color_hist()
def extract_features(imgs, cspace='RGB', spatial_size=(32, 32), hist_bins=32, orient=9, pix_per_cell=8,
cell_per_block=2, hog_channel=0, spatial_feat=True, hist_feat=True, hog_feat=True):
"""
Extract HOG feature of series images
Arguments:
imgs: source images array like. or image files name
cspace: color space HSV, RGB, HLS, YUV, YCrCb
orient: split 360˚ into orient parts
pix_per_cell: pixels per cell
cell_per_block: cells per block
hog_channel: which channel of image to extract HOG features
"""
# Create a list to append feature vectors to
features = []
# Iterate through the list of images
for file in imgs:
file_features = []
# Read in each one by one
if isinstance(file, str):
image = mpimg.imread(file)
else:
image = np.copy(file)
# apply color conversion if other than 'RGB'
if cspace != 'RGB':
if cspace == 'HSV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2HSV)
elif cspace == 'LUV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2LUV)
elif cspace == 'HLS':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2HLS)
elif cspace == 'YUV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2YUV)
elif cspace == 'YCrCb':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2YCrCb)
else: feature_image = np.copy(image)
if spatial_feat == True:
spatial_features = bin_spatial(feature_image, size=spatial_size)
file_features.append(spatial_features)
if hist_feat == True:
# Apply color_hist() NOTE: return (4,) tuple
hist_features = color_hist(feature_image, nbins=hist_bins)
file_features.append(hist_features[4])
if hog_feat == True:
# Call get_hog_features() with vis=False, feature_vec=True
if hog_channel == 'ALL':
hog_features = []
for channel in range(feature_image.shape[2]):
hog_features.append(get_hog_features(feature_image[:,:,channel],
orient, pix_per_cell, cell_per_block,
vis=False, feature_vec=True))
hog_features = np.ravel(hog_features)
else:
hog_features = get_hog_features(feature_image[:,:,hog_channel], orient,
pix_per_cell, cell_per_block, vis=False, feature_vec=True)
# Append the new feature vector to the features list
file_features.append(hog_features)
features.append(np.concatenate(file_features))
# Return list of feature vectors
return features### TODO: Tweak these parameters and see how the results change.
color_space = 'YCrCb' # Can be RGB, HSV, LUV, HLS, YUV, YCrCb
orient = 12 # HOG orientations
pix_per_cell = 8 # HOG pixels per cell
cell_per_block = 2 # HOG cells per block
hog_channel = "ALL" # Can be 0, 1, 2, or "ALL"
spatial_size = (32, 32) # Spatial binning dimensions
hist_bins = 32 # Number of histogram bins
spatial_feat = True # Spatial features on or off
hist_feat = True # Histogram features on or off
hog_feat = True # HOG features on or off
t = time.time()
car_features = extract_features(car_images, cspace=color_space, spatial_size=spatial_size,
hist_bins=hist_bins, orient=orient, pix_per_cell=pix_per_cell,
cell_per_block=cell_per_block, hog_channel=hog_channel, spatial_feat=spatial_feat,
hist_feat=hist_feat, hog_feat=hog_feat)
notcar_features = extract_features(noncar_images, cspace=color_space, spatial_size=spatial_size,
hist_bins=hist_bins, orient=orient, pix_per_cell=pix_per_cell,
cell_per_block=cell_per_block, hog_channel=hog_channel,
spatial_feat=spatial_feat, hist_feat=hist_feat, hog_feat=hog_feat)
t2 = time.time()
print(round(t2-t, 2), 'Seconds to extract features...')61.95 Seconds to extract features...
Train svc classifer and save paramters.
# Create an array stack of feature vectors
X = np.vstack((car_features, notcar_features)).astype(np.float64)
# Define the labels vector
y = np.hstack((np.ones(len(car_features)), np.zeros(len(notcar_features))))
# Split up data into randomized training and test sets
rand_state = np.random.randint(0, 100)
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=rand_state)
# Fit a per-column scaler
X_scaler = StandardScaler().fit(X_train)
# Apply the scaler to X
X_train = X_scaler.transform(X_train)
X_test = X_scaler.transform(X_test)
print('Using:',orient,'orientations',pix_per_cell,'pixels per cell and', cell_per_block,'cells per block')
print('Feature vector length:', len(X_train[0]))
# Use a linear SVC
svc = LinearSVC()
# Check the training time for the SVC
t=time.time()
svc.fit(X_train, y_train)
t2 = time.time()
print(round(t2-t, 2), 'Seconds to train SVC...')
# Check the score of the SVC
print('Test Accuracy of SVC = ', round(svc.score(X_test, y_test), 4))Using: 12 orientations 8 pixels per cell and 2 cells per block
Feature vector length: 10224
29.51 Seconds to train SVC...
Test Accuracy of SVC = 0.9868
# Save the parameters
save_file = "svc_pickle.p"
dist_pickle = {}
dist_pickle["color_space"] = color_space
dist_pickle["svc"] = svc
dist_pickle["scaler"] = X_scaler
dist_pickle["orient"] = orient
dist_pickle["pix_per_cell"] = pix_per_cell
dist_pickle["cell_per_block"] = cell_per_block
dist_pickle["spatial_size"] = spatial_size
dist_pickle["hist_bins"] = hist_bins
dist_pickle["hog_channel"] = hog_channel
dist_pickle["spatial_feat"] = spatial_feat
dist_pickle["hist_feat"] = hist_feat
dist_pickle["hog_feat"] = hog_feat
pickle.dump( dist_pickle, open(save_file , "wb" ) )dist_pickle = pickle.load( open("svc_pickle.p", "rb" ) )
color_space = dist_pickle["color_space"]
svc = dist_pickle["svc"]
X_scaler = dist_pickle["scaler"]
orient = dist_pickle["orient"]
pix_per_cell = dist_pickle["pix_per_cell"]
cell_per_block = dist_pickle["cell_per_block"]
spatial_size = dist_pickle["spatial_size"]
hist_bins = dist_pickle["hist_bins"]
hog_channel = dist_pickle["hog_channel"]
spatial_feat = dist_pickle["spatial_feat"]
hist_feat = dist_pickle["hist_feat"]
hog_feat = dist_pickle["hog_feat"] This code is adapted from lesson material

def slide_window(img, x_start_stop=[None, None], y_start_stop=[None, None], xy_window=(64, 64), xy_overlap=(0.5, 0.5)):
"""
Slide window
Arguments:
img: source image array like or image file image
x_start_stop: column, Horizontal coordinate from x_start_stop[0] to x_start_stop[1]
y_start_stop: row, Vertical coordinate begin with y_start_stop[0] and end with y_start_stop[1]
xy_window: pixel
xy_overlap: overlap percent
"""
# If x and/or y start/stop positions not defined, set to image size
if x_start_stop[0] == None:
x_start_stop[0] = 0
if x_start_stop[1] == None:
x_start_stop[1] = img.shape[1]
if y_start_stop[0] == None:
y_start_stop[0] = 0
if y_start_stop[1] == None:
y_start_stop[1] = img.shape[0]
# Compute the span of the region to be searched
xspan = x_start_stop[1] - x_start_stop[0]
yspan = y_start_stop[1] - y_start_stop[0]
# Compute the number of pixels per step in x/y
nx_pix_per_step = np.int(xy_window[0]*(1 - xy_overlap[0]))
ny_pix_per_step = np.int(xy_window[1]*(1 - xy_overlap[1]))
# Compute the number of windows in x/y
nx_buffer = np.int(xy_window[0]*(xy_overlap[0]))
ny_buffer = np.int(xy_window[1]*(xy_overlap[1]))
nx_windows = np.int((xspan-nx_buffer)/nx_pix_per_step)
ny_windows = np.int((yspan-ny_buffer)/ny_pix_per_step)
# Initialize a list to append window positions to
window_list = []
# Loop through finding x and y window positions
# Note: you could vectorize this step, but in practice
# you'll be considering windows one by one with your
# classifier, so looping makes sense
for ys in range(ny_windows):
for xs in range(nx_windows):
# Calculate window position
startx = xs*nx_pix_per_step + x_start_stop[0]
endx = startx + xy_window[0]
starty = ys*ny_pix_per_step + y_start_stop[0]
endy = starty + xy_window[1]
# Append window position to list
window_list.append(((startx, starty), (endx, endy)))
# Return the list of windows
return window_list
# Define a function to draw bounding boxes
def draw_boxes(img, bboxes, color=(0, 0, 255), thick=6):
# Make a copy of the image
imcopy = np.copy(img)
# Iterate through the bounding boxes
for bbox in bboxes:
# Draw a rectangle given bbox coordinates
cv2.rectangle(imcopy, bbox[0], bbox[1], color, thick)
# Return the image copy with boxes drawn
return imcopy## Test function
image = mpimg.imread('tempmatch_images/bbox-example-image.jpg')
windows = slide_window(image, x_start_stop=[None, None], y_start_stop=[None, None], xy_window=(128, 128),
xy_overlap=(0.5, 0.5))
window_img = draw_boxes(image, windows, color=(0, 0, 255), thick=6)
plt.imshow(window_img)<matplotlib.image.AxesImage at 0x1c2560acc0>

# Define a function to extract features from a single image window
# This function is very similar to extract_features()
# just for a single image rather than list of images
def single_img_features(img, cspace='RGB', spatial_size=(32, 32),hist_bins=32, orient=9, pix_per_cell=8,
cell_per_block=2, hog_channel=0,spatial_feat=True, hist_feat=True, hog_feat=True):
#1) Define an empty list to receive features
img_features = []
#2) Apply color conversion if other than 'RGB'
if cspace != 'RGB':
if cspace == 'HSV':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2HSV)
elif cspace == 'LUV':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2LUV)
elif cspace == 'HLS':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2HLS)
elif cspace == 'YUV':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2YUV)
elif cspace == 'YCrCb':
feature_image = cv2.cvtColor(img, cv2.COLOR_RGB2YCrCb)
else:
feature_image = np.copy(img)
#3) Compute spatial features if flag is set
if spatial_feat == True:
spatial_features = bin_spatial(feature_image, size=spatial_size)
#4) Append features to list
img_features.append(spatial_features)
#5) Compute histogram features if flag is set
if hist_feat == True:
hist_features = color_hist(feature_image, nbins=hist_bins)
#6) Append features to list
img_features.append(hist_features[4])
#7) Compute HOG features if flag is set
if hog_feat == True:
if hog_channel == 'ALL':
hog_features = []
for channel in range(feature_image.shape[2]):
hog_features.extend(get_hog_features(feature_image[:,:,channel], orient, pix_per_cell,
cell_per_block, vis=False, feature_vec=True))
else:
hog_features = get_hog_features(feature_image[:,:,hog_channel], orient, pix_per_cell,
cell_per_block, vis=False, feature_vec=True)
#8) Append features to list
img_features.append(hog_features)
#9) Return concatenated array of features
return np.concatenate(img_features)
# Define a function you will pass an image
# and the list of windows to be searched (output of slide_windows())
def search_windows(img, windows, clf, scaler, cspace ='RGB', spatial_size=(32, 32), hist_bins=32,
hist_range=(0, 256), orient=9, pix_per_cell=8, cell_per_block=2, hog_channel=0,
spatial_feat=True, hist_feat=True, hog_feat=True):
#1) Create an empty list to receive positive detection windows
on_windows = []
#2) Iterate over all windows in the list
for window in windows:
#3) Extract the test window from original image
test_img = cv2.resize(img[window[0][1]:window[1][1], window[0][0]:window[1][0]], (64, 64))
#4) Extract features for that window using single_img_features()
features = single_img_features(test_img, cspace=color_space, spatial_size=spatial_size,
hist_bins=hist_bins, orient=orient, pix_per_cell=pix_per_cell,
cell_per_block=cell_per_block, hog_channel=hog_channel,
spatial_feat=spatial_feat, hist_feat=hist_feat, hog_feat=hog_feat)
#5) Scale extracted features to be fed to classifier
test_features = scaler.transform(np.array(features).reshape(1, -1))
#6) Predict using your classifier
prediction = clf.predict(test_features)
#7) If positive (prediction == 1) then save the window
if prediction == 1:
on_windows.append(window)
#8) Return windows for positive detections
return on_windowsimage = mpimg.imread('tempmatch_images/bbox-example-image.jpg')
draw_image = np.copy(image)
# Uncomment the following line if you extracted training
# data from .png images (scaled 0 to 1 by mpimg) and the
# image you are searching is a .jpg (scaled 0 to 255)
image = image.astype(np.float32)/255
y_start_stop = [400, 700] # Min and max in y to search in slide_window()
windows = slide_window(image, x_start_stop=[None, None], y_start_stop=y_start_stop, xy_window=(96, 96),
xy_overlap=(0.5, 0.5))
hot_windows = search_windows(image, windows, svc, X_scaler, cspace=color_space, spatial_size=spatial_size,
hist_bins=hist_bins, orient=orient, pix_per_cell=pix_per_cell,
cell_per_block=cell_per_block, hog_channel=hog_channel, spatial_feat=spatial_feat,
hist_feat=hist_feat, hog_feat=hog_feat)
window_img = draw_boxes(draw_image, hot_windows, color=(0, 0, 255), thick=6)
plt.imshow(window_img)<matplotlib.image.AxesImage at 0x1c27559d68>

-
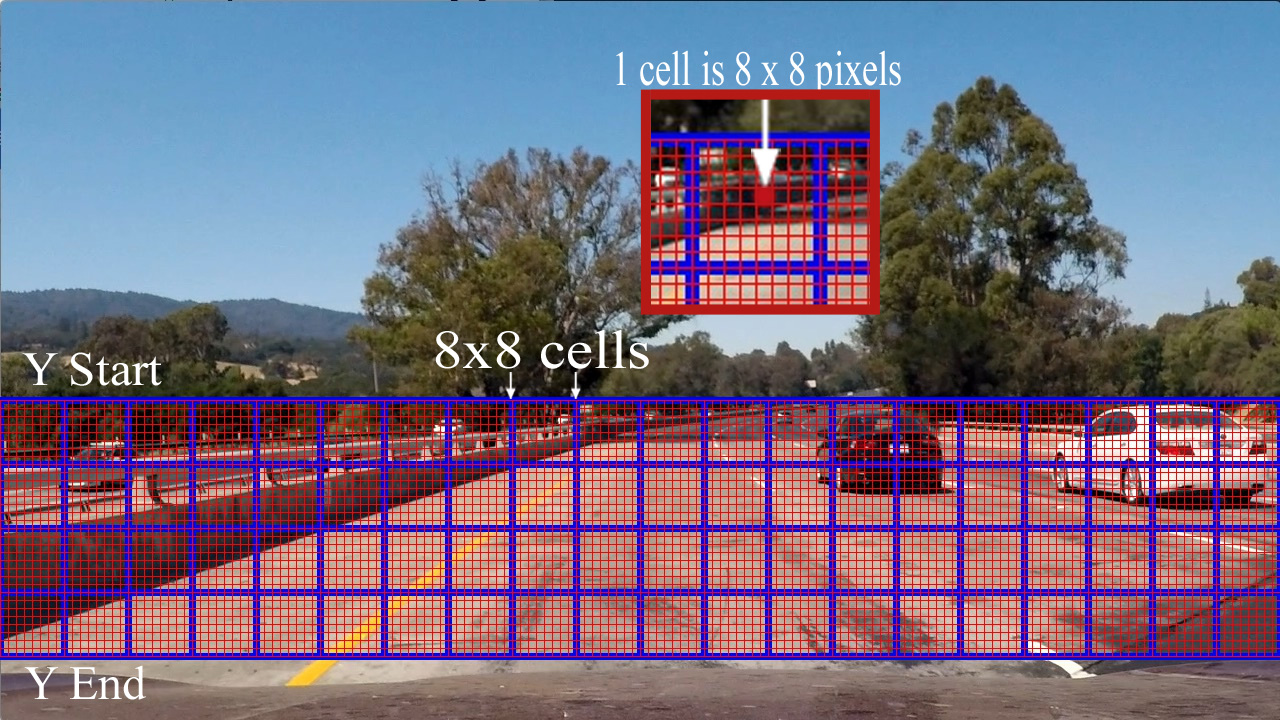
Using a 64 x 64 base window. If we define cells per pixel as 8 x 8, then a scale of 1 would retain a window that's 8 x 8 cells (8 cells to cover 64 pixels in either direction). An overlap of each window can be defined in terms of the cell distance, using cells_per_step. This means that a cells_per_step = 2 would result in a search window overlap of 75% (2 is 25% of 8, so we move 25% each time, leaving 75% overlap with the previous window).
Any value of scale that is larger or smaller than one will scale the base image accordingly, resulting in corresponding change in the number of cells per window. Its possible to run this same function multiple times for different scale values to generate multiple-scaled search windows.

def convert_color(img, conv='RGB2YCrCb'):
if conv == 'RGB2YCrCb':
return cv2.cvtColor(img, cv2.COLOR_RGB2YCrCb)
if conv == 'BGR2YCrCb':
return cv2.cvtColor(img, cv2.COLOR_BGR2YCrCb)
if conv == 'RGB2LUV':
return cv2.cvtColor(img, cv2.COLOR_RGB2LUV)
# Define a single function that can extract features using hog sub-sampling and make predictions
def find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block, spatial_size,
hist_bins, cells_per_step=2, boxcolor=(0,0,255), show_all_rectangles=False):
"""
Find cars in the area
Arguments:
img: source image
ystart: row begin to search
ystop: row stop to search
scale: rescale image
cspace: color space
hog_channel: which channel of image to extract HOG features
svc: SVM Classifier
orient: split 360˚ into orient parts
pix_per_cell: pixels per cell
cell_per_block: cells per block
show_all_rectangles: bool, whether show all rectangles
"""
if isinstance(img, str):
img = mpimg.imread(img)
draw_img = np.copy(img)
img = img.astype(np.float32)/255
img_tosearch = img[ystart:ystop,:,:]
ctrans_tosearch = convert_color(img_tosearch, conv='RGB2YCrCb')
if scale != 1:
imshape = ctrans_tosearch.shape
ctrans_tosearch = cv2.resize(ctrans_tosearch, (np.int(imshape[1]/scale), np.int(imshape[0]/scale)))
ch1 = ctrans_tosearch[:,:,0]
ch2 = ctrans_tosearch[:,:,1]
ch3 = ctrans_tosearch[:,:,2]
# Define blocks and steps as above
nxblocks = (ch1.shape[1] // pix_per_cell) - cell_per_block + 1
nyblocks = (ch1.shape[0] // pix_per_cell) - cell_per_block + 1
nfeat_per_block = orient*cell_per_block**2
# 64 was the orginal sampling rate, with 8 cells and 8 pix per cell
window = 64
nblocks_per_window = (window // pix_per_cell) - cell_per_block + 1
#cells_per_step = 2 # Instead of overlap, define how many cells to step
nxsteps = (nxblocks - nblocks_per_window) // cells_per_step + 1
nysteps = (nyblocks - nblocks_per_window) // cells_per_step + 1
# Compute individual channel HOG features for the entire image
hog1 = get_hog_features(ch1, orient, pix_per_cell, cell_per_block, feature_vec=False)
hog2 = get_hog_features(ch2, orient, pix_per_cell, cell_per_block, feature_vec=False)
hog3 = get_hog_features(ch3, orient, pix_per_cell, cell_per_block, feature_vec=False)
# bording box of dected cars
rectangles = []
random_color = False
for xb in range(nxsteps):
for yb in range(nysteps):
ypos = yb*cells_per_step
xpos = xb*cells_per_step
# Extract HOG for this patch
hog_feat1 = hog1[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_feat2 = hog2[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_feat3 = hog3[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_features = np.hstack((hog_feat1, hog_feat2, hog_feat3))
xleft = xpos*pix_per_cell
ytop = ypos*pix_per_cell
# Extract the image patch
subimg = cv2.resize(ctrans_tosearch[ytop:ytop+window, xleft:xleft+window], (64,64))
# Get color features
spatial_features = bin_spatial(subimg, size=spatial_size)
hist_features = color_hist(subimg, nbins=hist_bins)
# Scale features and make a prediction
test_features = X_scaler.transform(np.hstack((spatial_features, hist_features[4], hog_features)).reshape(1, -1))
#test_features = X_scaler.transform(np.hstack((shape_feat, hist_feat)).reshape(1, -1))
test_prediction = svc.predict(test_features)
if test_prediction == 1 or show_all_rectangles:
xbox_left = np.int(xleft*scale)
ytop_draw = np.int(ytop*scale)
win_draw = np.int(window*scale)
if boxcolor == 'random' or random_color:
boxcolor = (np.random.randint(0,255), np.random.randint(0,255), np.random.randint(0,255))
random_color = True
cv2.rectangle(draw_img,(xbox_left, ytop_draw+ystart),(xbox_left+win_draw,ytop_draw+win_draw+ystart),boxcolor,3)
rectangles.append(((xbox_left, ytop_draw+ystart),(xbox_left+win_draw,ytop_draw+win_draw+ystart)))
return img_tosearch, draw_img, rectanglesecuase the size and position of cars in the image will be different depending on their distance from the camera, find_cars will have to be called a few times with different ystart, ystop, and scale values. These next few blocks of code are for determining the values for these parameters that work best.
img = mpimg.imread('tempmatch_images/bbox-example-image.jpg')
ystart = 400
scale = 3
ystop = 680
clip_img, out_img, box_list = find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell,
cell_per_block, spatial_size, hist_bins, boxcolor='random',
show_all_rectangles=True)
show_images([clip_img,out_img],['Cliped Image: y = [%d, %d]'%(ystart, ystop),'Searched Image'],cols = 2,ticksshow = True)
ystart = 400
scale = 2
ystop = 656
clip_img, out_img, box_list = find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell,
cell_per_block, spatial_size, hist_bins, boxcolor='random',
show_all_rectangles=True)
show_images([clip_img,out_img],['Cliped Image: y = [%d, %d]'%(ystart, ystop),'Searched Image'],cols = 2,ticksshow = True)
ystart = 400
scale = 1.5
ystop = 600
clip_img, out_img, box_list = find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell,
cell_per_block, spatial_size, hist_bins, boxcolor='random',
show_all_rectangles=True)
show_images([clip_img,out_img],['Cliped Image: y = [%d, %d]'%(ystart, ystop),'Searched Image'],cols = 2,ticksshow = True)
ystart = 400
scale = 0.8
ystop = 540
clip_img, out_img, box_list = find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell,
cell_per_block, spatial_size, hist_bins, boxcolor='random',
show_all_rectangles=True)
show_images([clip_img,out_img],['Cliped Image: y = [%d, %d]'%(ystart, ystop),'Searched Image'],cols = 2,ticksshow = True)



-
To make a heat-map, I'm simply going to add "heat" (+=1) for all pixels within windows where a positive detection is reported by your classifier.
def add_heat(heatmap, bbox_list):
"""
Compute the area bounding box numbers
Arguments:
heatmap: array zeros like image
bbox_list: bou
"""
# Iterate through list of bboxes
for box in bbox_list:
# Add += 1 for all pixels inside each bbox
# Assuming each "box" takes the form ((x1, y1), (x2, y2))
heatmap[box[0][1]:box[1][1], box[0][0]:box[1][0]] += 1
# Return updated heatmap
return heatmap
def apply_threshold(heatmap, threshold):
"""
Apply threshold to remove false positives
Arguments:
heatmap: heat map
threshold: threshold
"""
# Zero out pixels below the threshold
heatmap[heatmap <= threshold] = 0
# Return thresholded map
return heatmap
def draw_labeled_bboxes(img, labels):
"""
Draw labeled bounding boxes
Arguments:
img: source image, array like or image file name
babels: labels
"""
if isinstance(img, str):
img = mpimg.imread(img)
# Iterate through all detected cars
for car_number in range(1, labels[1]+1):
# Find pixels with each car_number label value
nonzero = (labels[0] == car_number).nonzero()
# Identify x and y values of those pixels
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# Define a bounding box based on min/max x and y
bbox = ((np.min(nonzerox), np.min(nonzeroy)), (np.max(nonzerox), np.max(nonzeroy)))
# Draw the box on the image
cv2.rectangle(img, bbox[0], bbox[1], (0,0,255), 6)
# Return the image
return img
def heatmap_filter(img, box_list, threshold=1):
if isinstance(img, str):
img = mpimg.imread(img)
heat = np.zeros_like(img[:,:,0]).astype(np.float)
# Add heat to each box in box list
heat = add_heat(heat, box_list)
# Apply threshold to help remove false positives
heat = apply_threshold(heat, threshold)
# Visualize the heatmap when displaying
heatmap = np.clip(heat, 0, 255)
# Find final boxes from heatmap using label function
labels = label(heatmap)
draw_img = draw_labeled_bboxes(np.copy(img), labels)
return heatmap, draw_img
def find_car_heatmap(img, ystart, ystop, scale, svc, X_scaler, orient,pix_per_cell, cell_per_block,
spatial_size, hist_bins,cells_per_step, threshold=1, deg_show = True):
clip_img, out_img, box_list = find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell,
cell_per_block, spatial_size, hist_bins, cells_per_step,
show_all_rectangles=False)
heatmap,draw_img = heatmap_filter(img, box_list, threshold=threshold)
result = draw_boxes(img, box_list)
if deg_show:
fig = plt.figure(figsize=(18, 18))
plt.subplot(141)
plt.imshow(clip_img)
plt.title('Area dected')
plt.xticks([])
plt.yticks([])
plt.subplot(142)
plt.imshow(result)
plt.title('boxed list Car Positions')
plt.xticks([])
plt.yticks([])
plt.subplot(143)
plt.imshow(heatmap, cmap='hot')
plt.title('Heat Map')
plt.xticks([])
plt.yticks([])
plt.subplot(144)
plt.imshow(draw_img)
plt.title('Car Positions')
plt.xticks([])
plt.yticks([])
plt.tight_layout(pad=0, h_pad=0, w_pad=0)img = mpimg.imread('test_images/test5.jpg')
# img = mpimg.imread('test_images/bbox-example-image.jpg')
# img = img.astype(np.float32)/255
ystart = 400
scale = 3
ystop = 680
cells_per_step = 1
threshold = 2
find_car_heatmap(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block,
spatial_size, hist_bins,cells_per_step,threshold=threshold)
ystart = 400
scale = 2
ystop = 656
cells_per_step = 2
threshold = 2
find_car_heatmap(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block,
spatial_size, hist_bins,cells_per_step,threshold=threshold)
ystart = 400
scale = 1.5
ystop = 600
cells_per_step = 2
threshold = 2
find_car_heatmap(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block,
spatial_size, hist_bins,cells_per_step,threshold=threshold)
ystart = 360
scale = 1.2
ystop = 540
cells_per_step = 2
threshold = 3
find_car_heatmap(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block,
spatial_size, hist_bins,cells_per_step,threshold=threshold)



from collections import deque
class Vechiledectect():
def __init__(self, maxlen=15):
self.ystart = 400
self.ystop = 656
self.scale = 1.5
self.cells_per_step = 2
dist_pickle = pickle.load( open("svc_pickle.p", "rb" ) )
self.svc = dist_pickle["svc"]
self.X_scaler = dist_pickle["scaler"]
self.orient = dist_pickle["orient"]
self.pix_per_cell = dist_pickle["pix_per_cell"]
self.cell_per_block = dist_pickle["cell_per_block"]
self.spatial_size = dist_pickle["spatial_size"]
self.hist_bins = dist_pickle["hist_bins"]
self.spatial_feat = dist_pickle["spatial_feat"]
self.hist_feat = dist_pickle["hist_feat"]
self.hog_feat = dist_pickle["hog_feat"]
self.heatmaps = deque(maxlen = maxlen)
def vechile_find(self, image, debugcombined=True, framenumber=None):
# multi scale search
search_parameter = [[400,720,3.0,1],\
[400,656,2.0,1],\
[400,600,1.5,2],\
[400,550,1.0,2],\
[400,510,0.8,2]]
box_lists = []
for i in range(len(search_parameter)):
[self.ystart, self.ystop, self.scale, self.cells_per_step] = search_parameter[i]
#rescale recording to image size
self.ystart = int(image.shape[0]*(self.ystart/720))
self.ystop = int(image.shape[0]*(self.ystop/720))
clip_img,out_img,box_list = find_cars(image, self.ystart, self.ystop, self.scale, self.svc, self.X_scaler,
self.orient, self.pix_per_cell, self.cell_per_block,
self.spatial_size, self.hist_bins, self.cells_per_step,
boxcolor='random')
box_lists += box_list
heat = np.zeros_like(image[:,:,0]).astype(np.float)
# Add heat to each box in box list
heat = add_heat(heat,box_lists)
# Apply threshold to help remove false positives
heat = apply_threshold(heat,len(search_parameter)+1-1)
# Visualize the heatmap when displaying
heatmap = np.clip(heat, 0, 255)
self.heatmaps.append(heatmap)
heatmap = np.mean(self.heatmaps,axis=0)
# Find final boxes from heatmap using label function
labels = label(heatmap)
draw_img = draw_labeled_bboxes(np.copy(image), labels)
if debugcombined == True:
# Calculate the size of screens
result_screen_w = image.shape[1]
result_screen_h = image.shape[0]
debug_screen_w = np.int(result_screen_w/2)
debug_screen_h = np.int(result_screen_h/2)
screen_w = result_screen_w + debug_screen_w
screen_h = result_screen_h
# Assign result image to the screen
#show screen
screen = np.zeros((screen_h,screen_w,3),dtype=np.uint8)
# if framenumber != None:
# cv2.putText(unwarp_images,'frame index:{:}'.format(framenumber),(10,270),cv2.FONT_HERSHEY_COMPLEX,2,(255,255,255),3)
screen[0:result_screen_h,0:result_screen_w,:] = draw_img
result = draw_boxes(image, box_lists)
# Assign debug image to the screen
screen[0:debug_screen_h,result_screen_w:,:] = cv2.resize(result,(debug_screen_w,debug_screen_h))
if np.max(heatmap)> 0:
debug_img_1 = np.dstack((heatmap,heatmap,heatmap))*int(255/np.max(heatmap))
screen[debug_screen_h : debug_screen_h*2,result_screen_w:,:] = cv2.resize(debug_img_1,(debug_screen_w,debug_screen_h))
return screen
else:
return draw_imgtest_images = [plt.imread(path) for path in glob.glob('test_images/test*.jpg')]
for i, image in enumerate(test_images):
L = Vechiledectect()
res = L.vechile_find(image)
fig = plt.figure(figsize=(18, 18))
plt.imshow(res)





# Import everything needed to edit/save/watch video clips
from moviepy.editor import VideoFileClip
from IPython.display import HTMLproject_source = "project_video.mp4"
project_output = "project_video_output.mp4"
## To speed up the testing process you may want to try your pipeline on a shorter subclip of the video
## To do so add .subclip(start_second,end_second) to the end of the line below
## Where start_second and end_second are integer values representing the start and end of the subclip
## You may also uncomment the following line for a subclip of the first 5 seconds
##clip1 = VideoFileClip("test_videos/solidWhiteRight.mp4").subclip(0,5)
L = Vechiledectect()
clip1 = VideoFileClip(project_source)
line_clip = clip1.fl_image(L.vechile_find) #NOTE: this function expects color images!!
%time line_clip.write_videofile(project_output, audio=False)[MoviePy] >>>> Building video project_video_output.mp4
[MoviePy] Writing video project_video_output.mp4
100%|█████████▉| 1260/1261 [45:23<00:01, 1.73s/it]
[MoviePy] Done.
[MoviePy] >>>> Video ready: project_video_output.mp4
CPU times: user 2h 22min 32s, sys: 3min 44s, total: 2h 26min 16s
Wall time: 45min 24s
line_clip.resize(height=240).speedx(5).to_gif('project.gif')[MoviePy] Building file project.gif with imageio
100%|█████████▉| 252/253 [07:50<00:02, 2.18s/it]


From above image, we can see the left bounding box is wrong.
I select spatial, historgram and hog features to get the svm medel. The above error occurs, I guess, because the spatial and historgram features are not enough to describe the vehicle while the HOG features only take up 1/3 of the whole features.
So, next I will reduce the percentage of spatial and historgram and increase the HOG percentage to robust the model.