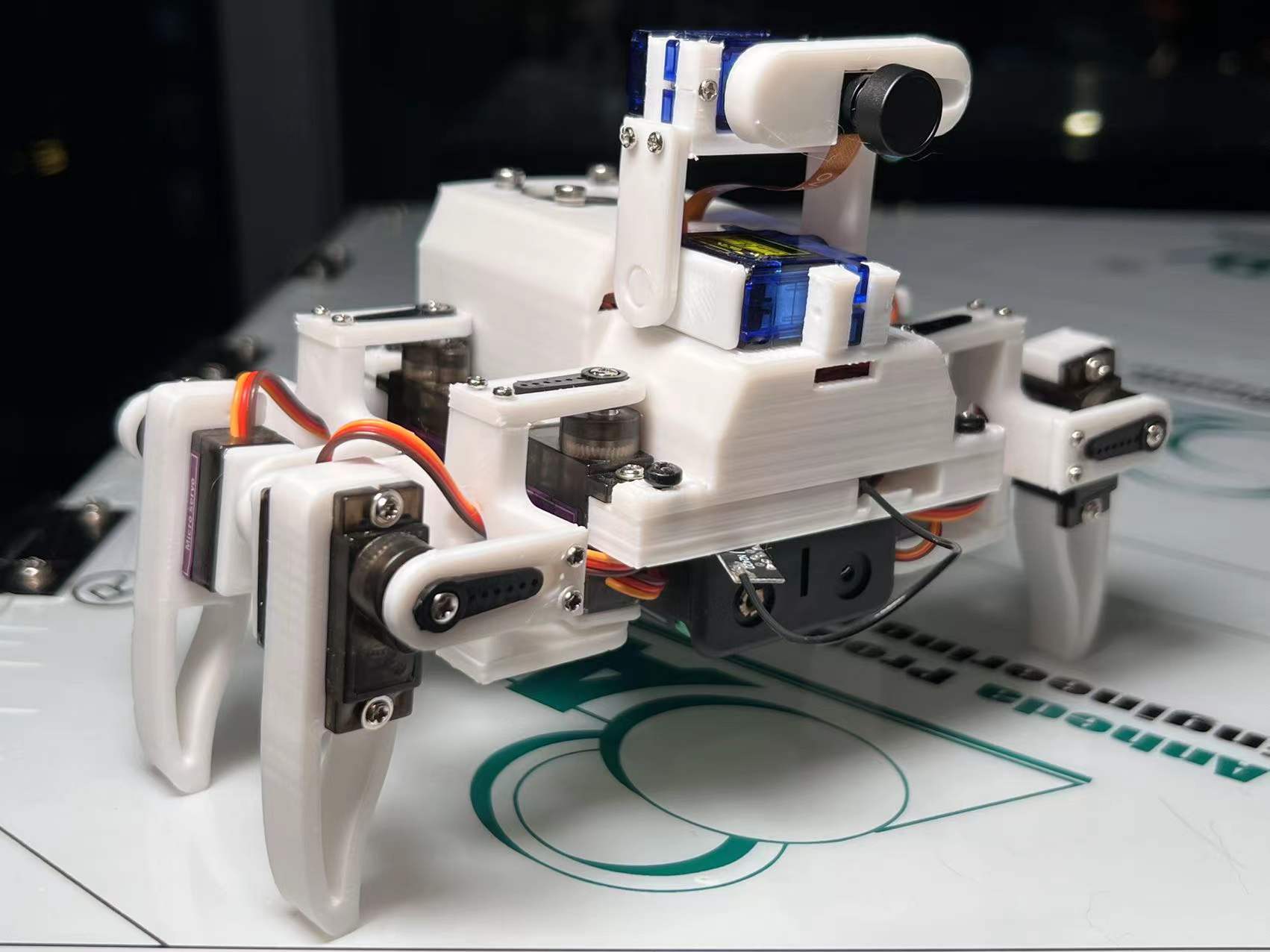
esp32 quadruped robot with arduino
Using 3D-printer an build it !
-
Prepare the ESP32 development environment
-
install lib: Adafruit_SSD1306, MPU6050 (by Electronic Cats), Adafruit_PWM_Servo_Driver_Library
-
Modify YOUR SSID and PASSWD in the code
-
Connect USB , hold the pin0 and upload
-
Reset it and open the monitor, get this device IP, (esp32 work with station mode)
-
Open browser with IP, you may see the camera image.

you may make a PCB circuit board proofing, and you may perpar :
- servo : mg90s 10
- esp32-cam board
- ov2640 (fpc 15cm at least)
- battery: 18650* 2
- parallel connection battery holder
- 5V fan (2.5cm*2.5cm )
PCB circuit board BOM:
- power: FP6276*2
- gyroscope : MPU6050
- servo control IC:pca9685
- USB to UART IC : ch340N
- charge IC: TP4056
- Thermal Camer : MLX90640 (Not necessary)
- OLED : SSD1306 (Not necessary)
- External antenna (Not necessary)
Screw:
- M1.7*8 x50
- M4*10 x4
- M3*10 x10
- M3*35 x4
- M3 Nut x2
- and so on ~