This codebase can be used to reproduce the results from our paper, A Cordial Sync: Going Beyond Marginal Policies for Multi-Agent Embodied Tasks accepted to the 2020 European Conference on Computer Vision (ECCV'20). For any concerns or questions, please either create a GitHub issue (preferred) or reach out to one of the joint first-authors on the above paper.
We also include useful code for our previous work on collaborative embodied agents - Two Body Problem (CVPR'19).

- Installation
- Running a FurnMove experiment
- Reproducing plots and tables
- Code structure
- Additional information
The following will describe how you may install all python dependencies as well as how to download our custom AI2-THOR build and model checkpoints. While downloading model checkpoints is optional, downloading our AI2-THOR build is required to enable the FurnMove and FurnLift tasks.
Begin by cloning this repository to your local machine and moving into the top-level directory.
This library has been tested only in python 3.6, the following assumes you have a working
version of python 3.6 installed locally. In order to install requirements we recommend
using pipenv but also include instructions if
you would prefer to install things directly using pip.
If you have already installed pipenv, you may
run the following to install all requirements.
pipenv install --skip-lockThis should an automatically fix any dependencies and give an output like:
$ pipenv install --skip-lock
Removing virtualenv (/Users/USERNAME/.local/share/virtualenvs/cordial-sync-TKiR-u2H)…
Creating a virtualenv for this project…
Pipfile: /PATH/TO/DIR/cordial-sync/Pipfile
Using /usr/bin/python3 (3.6.10) to create virtualenv…
⠹ Creating virtual environment...Using base prefix '/usr'
New python executable in /SOME/PATH/virtualenvs/cordial-sync-TKiR-u2H/bin/python3
Also creating executable in /SOME/PATH/virtualenvs/cordial-sync-TKiR-u2H/bin/python
Installing setuptools, pip, wheel...
done.
Running virtualenv with interpreter /usr/bin/python3
✔ Successfully created virtual environment!
Virtualenv location: /SOME/PATH/virtualenvs/new-mathor-TKiR-u2H
Installing dependencies from Pipfile…
An error occurred while installing torch~=1.1.0! Will try again.
An error occurred while installing tensorboardx! Will try again.
An error occurred while installing tables! Will try again.
🐍 ▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉ 29/29 — 00:02:56
Installing initially failed dependencies…
☤ ▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉▉ 3/3 — 00:01:47
To activate this project's virtualenv, run pipenv shell.
Alternatively, run a command inside the virtualenv with pipenv run.You may need to run this command twice to ensure everything is installed properly.
Note: do not run the following if you have already installed requirements with pipenv
as above. If you prefer using pip, you may install all requirements as follows
pip install -r requirements.txtDepending on your machine configuration, you may need to use pip3 instead of pip in the
above.
To reproduce our results and run new experiments you will need to download our custom AI2-THOR build, model checkpoints, and evaluation data. We have included a helper script that will download these files and extract them into the appropriate directories. To run this script simply run the following two lines from within the top-level project directory
export PYTHONPATH=$PYTHONPATH:$PWD
python rl_multi_agent/scripts/download_evaluation_data.pyYou may then need to make the downloaded AI2-THOR builds executable:
chmod -R +x ai2thor_buildsIf you would prefer to download all files manually, or are interested in what is being downloaded, please see the following three sections.
You should not need to do the following if you have successfully run the download_evaluation_data.py script.
To run our FurnLift and FurnMove experiments, you must download our custom AI2-THOR build. You
can find this build (for MacOSX and Linux) at this link. Please unzip this directory into
the top-level directory of this project (the path cordial-sync/ai2thor_builds should contain
2 files and a directory).
After downloading, you may then need to make the downloaded AI2-THOR builds executable:
chmod -R +x ai2thor_buildsYou should not need to do the following if you have successfully run the download_evaluation_data.py script.
Our model checkpoints can be downloaded at this link. Please unzip this file and move the contents of the
unzipped folder (this should be the two directories final_furnlift_ckpts and final_furnmove_ckpts)
into the trained_models directory of this project. These two directories contain all final model checkpoints
for our FurnLift and FurnMove experiments.
You should not need to do the following if you have successfully run the download_evaluation_data.py script.
While not necessary to begin using our codebase, if you would like to reproduce the plots from our paper
(or evaluate your model on the same test set that we use) you will need to download this link. Extract the contents to data directory into the top-level directory of this project (this will overwrite)
the empty data directory that already exists when cloning this repository.
All FurnMove (and FurnLift) experiment config files can be found in the rl_multi_agent/experiments
directory. As an example, let's say we wish to train two agents to complete the FurnMove task and,
furthermore, we wish to use agents with a CORDIAL loss and SYNC policies. The experimental configuration
for this can be found in the file rl_multi_agent/experiments/furnmove_vision_mixture_cl_rot_config.py.
To beginning training for a total of 1e6 episodes with
- 2 GPUs (with IDs 0 and 1),
- 2 workers,
- Using amsgrad,
- Backproping gradients every 50 steps, and
- Saving checkpoints every 5000 training episodes
we should run the command
python rl_multi_agent/main.py --task furnmove_vision_mixture_cl_rot --experiment_dir rl_multi_agent/experiments --gpu_ids 0 1 --amsgrad t --workers 2 --num_steps 50 --save_freq 5000 --max_ep 1000000To train a similar model in our gridworld one can simply replace
furnmove_vision_mixture_cl_rot with furnmove_grid_mixture_cl_rot in the above. To train the
same (visual) model as above but in the FurnLift task, one can replace furnmove_vision_mixture_cl_rot
with furnlift_vision_mixture_cl.
Downloading our evaluation data, is the easiest means by which you can quickly reproduce our tables and plots. With the data/ repository in place the following scripts would come useful:
-
rl_multi_agent/analysis/summarize_furnlift_eval_results.py- Summarize data saved in the
data/furnlift_evaluations__test/directory, as a result of downloading data or running evaluation using the scriptrl_multi_agent/scripts/run_furnmove_or_furnlift_evaluations.py
- Summarize data saved in the
-
rl_multi_agent/analysis/summarize_furnmove_eval_results.py- Same as above, except for that this deals with FurnMove data summarization
-
rl_multi_agent/analysis/visualize_furnmove_and_furnlift_log_jsons.py- This script can be used to reproduce the training curves presented in our paper. Note that you might see a user warning for validation set's TVD and Invalid Prob metrics (which we did not record when training these models initially). If you need them, you can generate them via [evaluating from scratch](Evaluating from scratch).
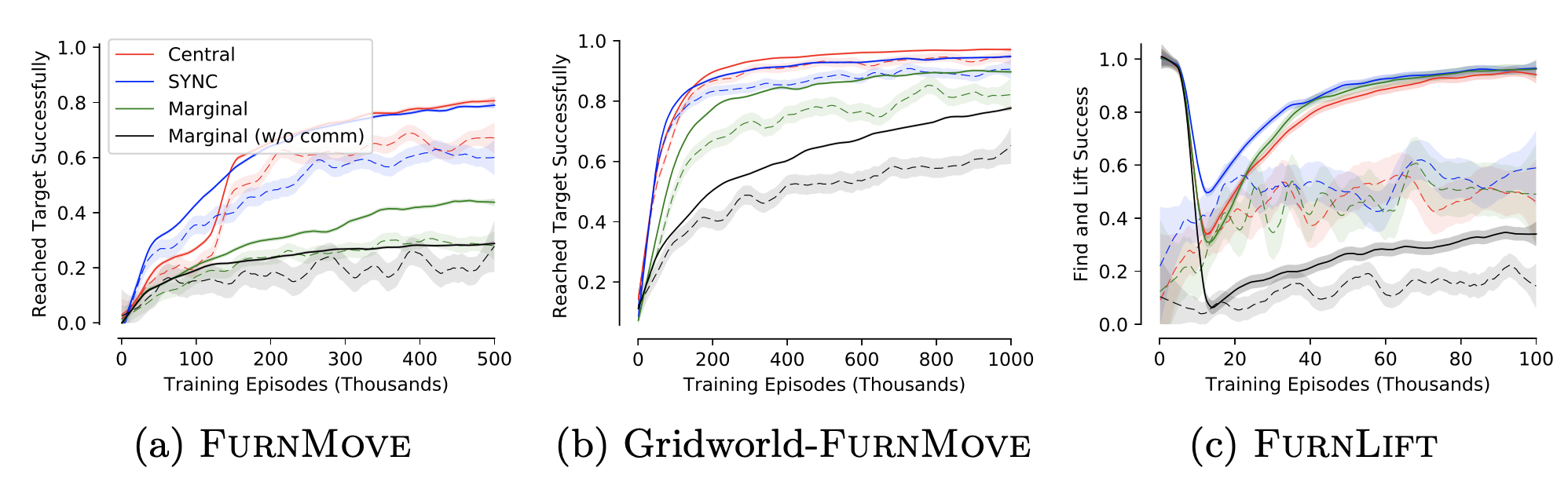
- This script can be used to reproduce the training curves presented in our paper. Note that you might see a user warning for validation set's TVD and Invalid Prob metrics (which we did not record when training these models initially). If you need them, you can generate them via [evaluating from scratch](Evaluating from scratch).
-
rl_multi_agent/analysis/visualize_furnmove_time_averaged_policies.py- This script generates joint policy summaries presented in the paper.
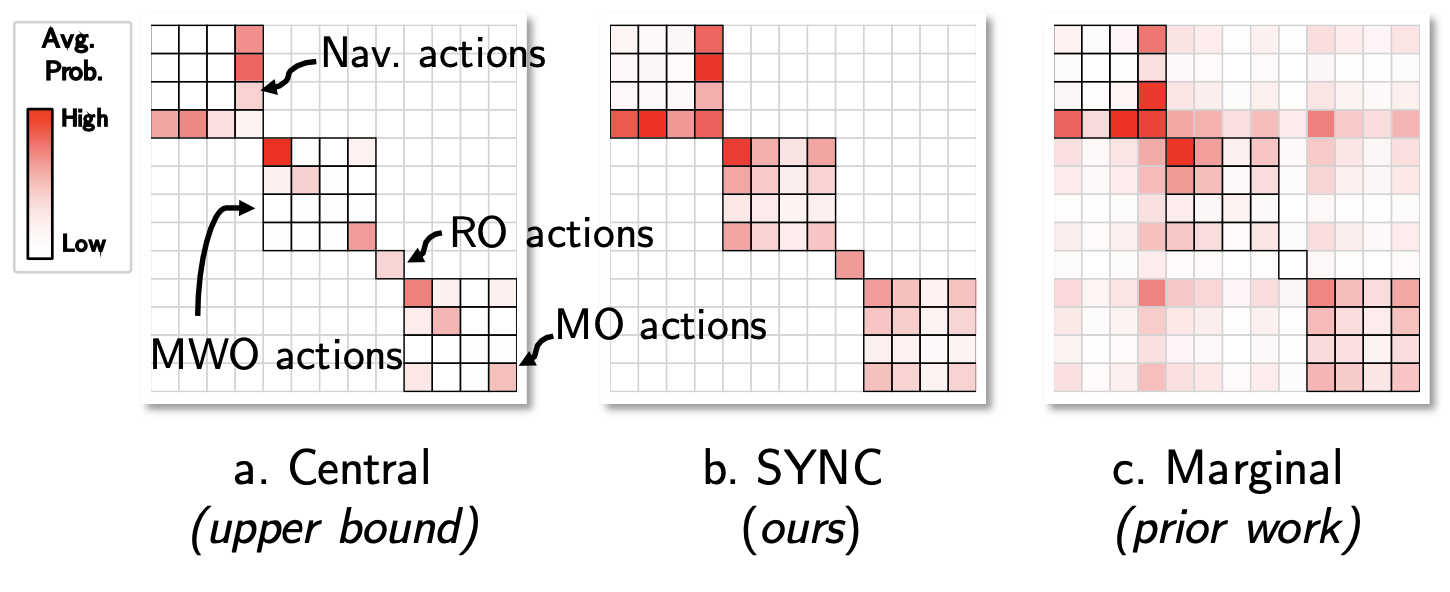
- This script generates joint policy summaries presented in the paper.
-
rl_multi_agent/analysis/visualize_gridbased_furnmove_trajectories.py- Gridworld (2-agent) test data is analysed and the
trajectory summaries (4 top-down views, evenly spread over the episode) and selected video
trajectories are saved in
ABS_PATH_TO_ANALYSIS_RESULTS_DIRi.e. theanalysis_outputdirectory. Moreover, if the method being analysed is communicative, an audio rendering of the agent's communication is also saved as a MIDI file. - An example of trajectory summary is shown below is for SYNC method for Gridworld-FurnMove. Particularly, the test scene
FloorPlan229for test episode 15 (out of 0-199/scene). The nameFloorPlan229_physics__15__0_44_88_132.pngincludes0_44_88_132indicating the steps at which the top-down view were recorded. The fact that it goes to132(<250) also indicates that this episode was successful.
- An example of the video (converted to gif), of the same episode is included below.
- Gridworld (2-agent) test data is analysed and the
trajectory summaries (4 top-down views, evenly spread over the episode) and selected video
trajectories are saved in
-
rl_multi_agent/analysis/visualize_visionbased_furnmove_trajectories.py- Analogous to the above but for marginal and SYNC 2-agent methods.
- Trajectory summary for same test episode for SYNC method for (visual-)FurnMove is shown below.

- The corresponding video (converted to gif), of the same episode is included below.







If you would like to rerun all evaluations from scratch (but using our model checkpoints), please see the documentation for the scripts:
rl_multi_agent/scripts/generate_furnlift_starting_locations_for_evaluation.py- Generates a fixed dataset of agent starting locations to be used during evaluation in the FurnLift task.
rl_multi_agent/scripts/generate_furnmove_starting_locations_for_evaluation.py- Generates a fixed dataset of agent starting locations to be used during evaluation in the FurnMove task.
rl_multi_agent/scripts/run_furnmove_or_furnlift_evaluations.py.- Evaluates the FurnMove/FurnLift model checkpoints on the above generated evaluation datasets. [See how to download our checkpoints](Downloading model checkpoints).
If you wish to go even one step further and retrain our models, you will need to follow
the directions in the above running a FurnMove experiment
section on all of the relevant experiments. Suppose now you have trained a new model
checkpoint (e.g. my_great_checkpoint.dat) using the rl_multi_agent/experiments/furnlift_vision_central_cl_config.py
experiment configuration. To evaluate this checkpoint you will now need to edit the
corresponding evaluation config file (rl_multi_agent/furnlift_eval_experiments/furnlift_vision_central_cl_config.py)
so that the saved_model_path method will return the path to your checkpoint.
Here we briefly summarize contents of each directory:
ai2thor_builds- We have introduced additional functionality into AI2-THOR to enable our FurnMove and FurnLift tasks. Because of this, one must download our custom AI2-THOR builds to run our experiments. This directory should contain these builds.analysis_output- This directory will store any images, videos, or other files generated when analyzing trained models.data- This directory contains any static datasets to be used during evaluation or for analysis. E.g. this directory will might contain a file listing all agent starting positions to be used during evaluation. We recommend downloading, as described above, our saved version of this file instead of attempting to regenerate it yourself.images- Contains images used for readme.images/action_icons- Contains icons depicting the FurnMove agent actions. These are used when generating videos.logs- All training (tensorboard) logs will be saved into this directory.rl_ai2thor- Classes/methods used to interface with AI2-THOR (and our gridworld variant of AI2-THOR).rl_base- Basic reinforcement learning abstractions. For instance, the abstract classesRLAgent,Episode, andMultiAgentEpisode.rl_multi_agent- This is the main directory of interest. It contains our main training script (main.py), modules defining the FurnMove and FurnLift experiments (furnlift_episodes.py,furnmove_episodes.py), and our models (models.py). This directory has a number of useful subdirectories as well:analysis- A collection of scripts to analyze/visualize our trained models.scripts- A number of helper scripts to generate datasets for analysis using our trained models.experiments- All training experiment configuration files.furnlift_eval_experiments- Experiment configuration files for evaluating trained FurnLift models.furnmove_eval_experiments- Experiment configuration files for evaluating trained FurnMove models.
trained_models- A directory where model checkpoints are stored.utils- A collection of helpful utility functions.
If you would like to make such a contributions we recommend first submitting an issue describing your proposed improvement. Doing so can ensure we can validate your suggestions before you spend a great deal of time upon them. Small (or validated) improvements and bug fixes should be made via a pull request from your fork of this repository.
This work builds upon the open-sourced pytorch-a3c library of Ilya Kostrikov.
If you use this codebase, please consider citing Cordial Sync and Two Body Problem.
@InProceedings{JainWeihs2020CordialSync,
author = {Jain, Unnat and Weihs, Luca and Kolve, Eric and Farhadi, Ali and Lazebnik, Svetlana and Kembhavi, Aniruddha and Schwing, Alexander G.},
title = {A Cordial Sync: Going Beyond Marginal Policies For Multi-Agent Embodied Tasks},
booktitle = {ECCV},
year = {2020},
note = {first two authors contributed equally},
}@InProceedings{JainWeihs2019TwoBody,
author = {Jain, Unnat and Weihs, Luca and Kolve, Eric and Rastegari, Mohammad and Lazebnik, Svetlana and Farhadi, Ali and Schwing, Alexander G. and Kembhavi, Aniruddha},
title = {Two Body Problem: Collaborative Visual Task Completion},
booktitle = {CVPR},
year = {2019},
note = {first two authors contributed equally},
}