- Project Submission Due : 23/Oct/2017
- Term 3 End : 6/Nov/2017
-
- Evotianus Benedicto: evotianusx@gmail.com (Deep Learning Lead)
- Rohit Patil: rohts.patil@gmail.com
-
- An Nguyen: anguyen3@rockets.utoledo.edu (RoboFolks Team Lead)
-
- Andrew Wilkie: andrew.d.wilkie@gmail.com (Control & Document Lead)
- Quiang Lu: buaaluqiang@hotmail.com
Project Introduction: presentation
-
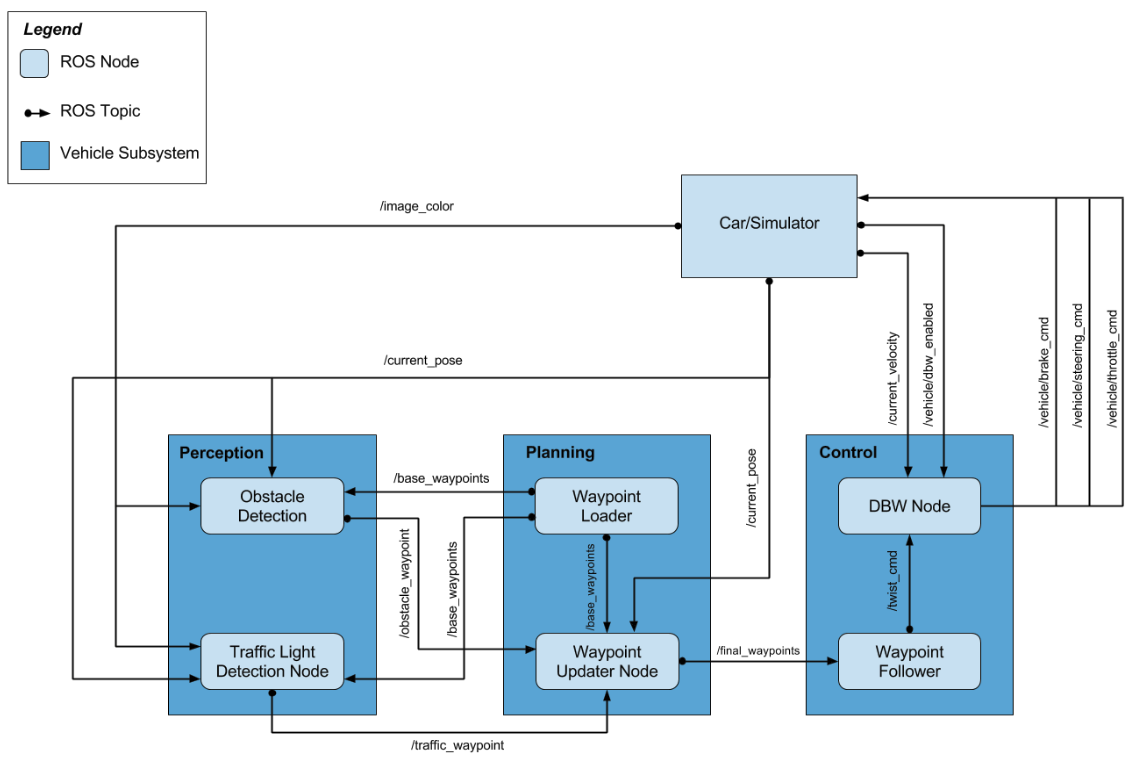
High level architecture from course lesson
-
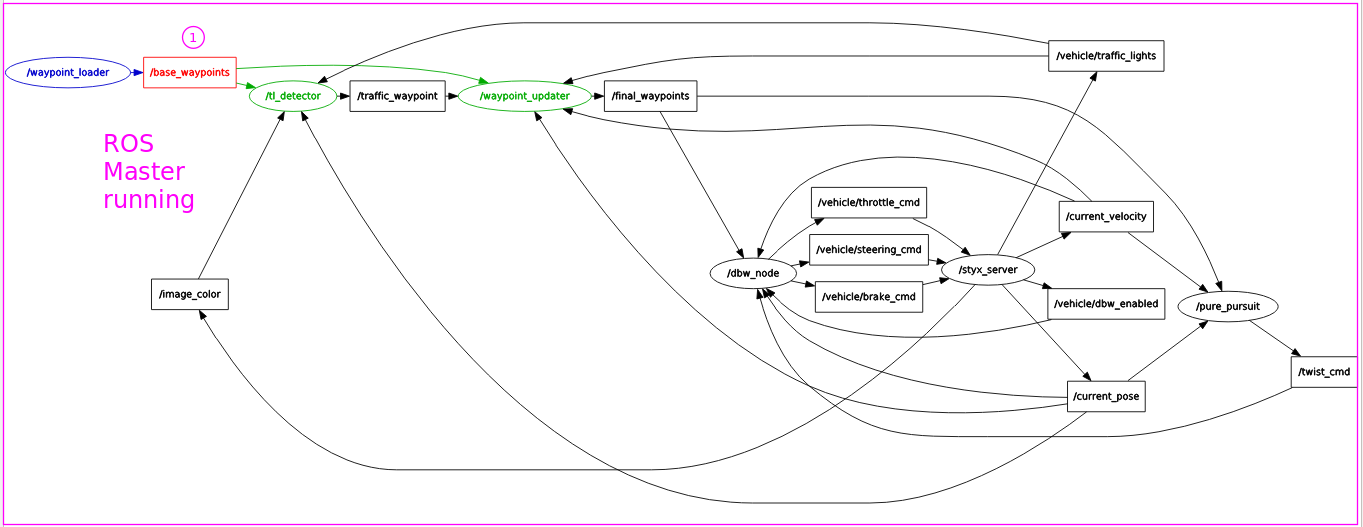
ROS Master running
-
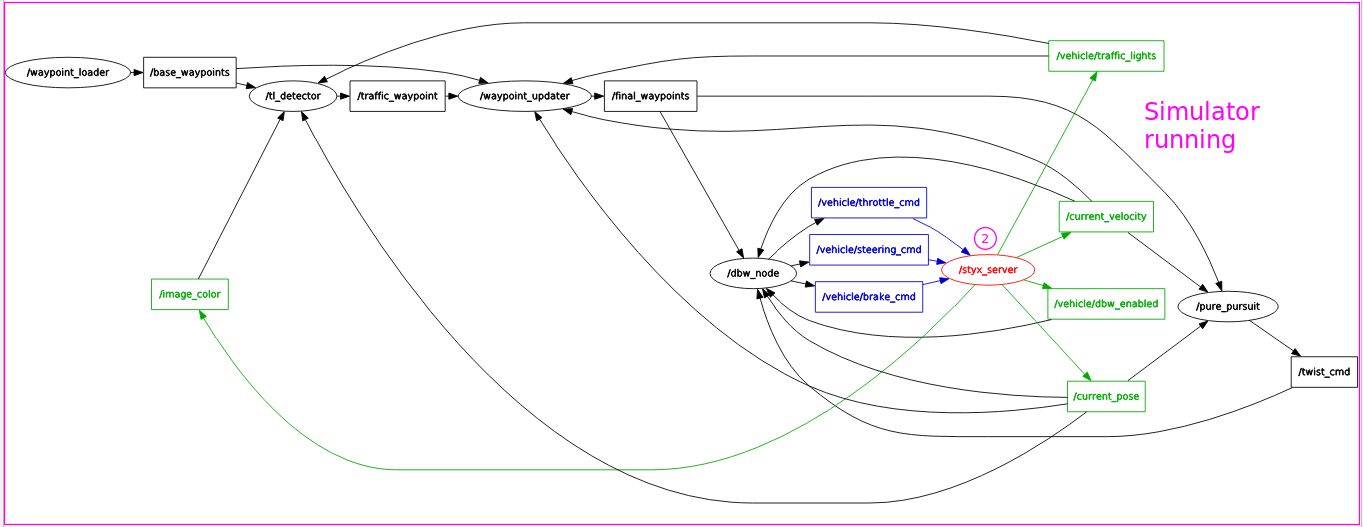
Simulator running
-
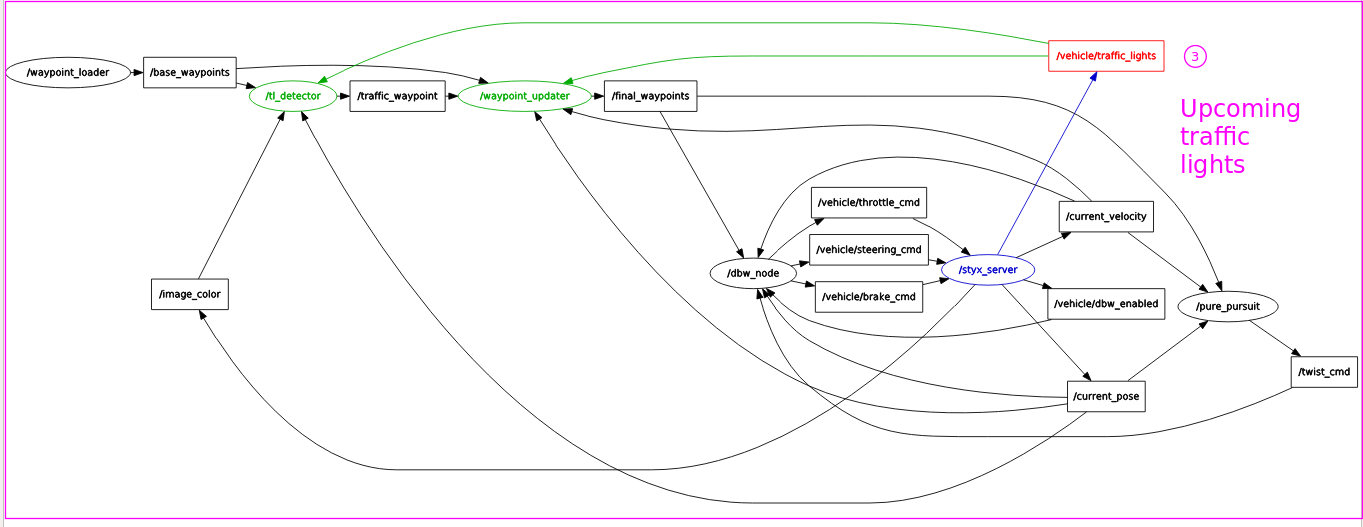
Upcoming traffic lights
-
Red traffic light perceived
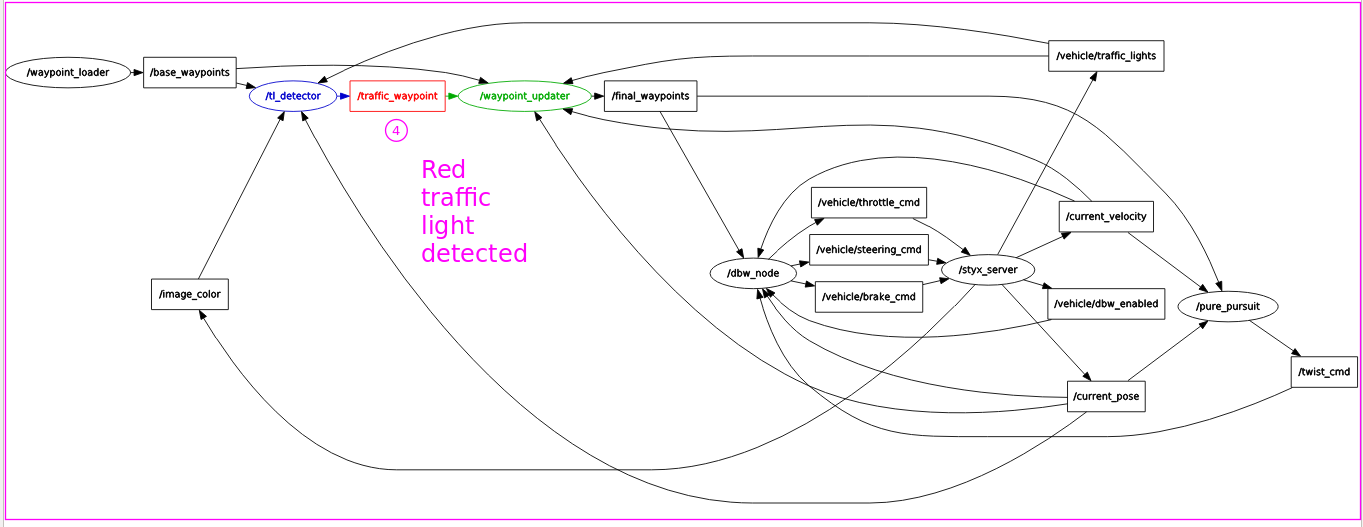
-
New target trajectory planned
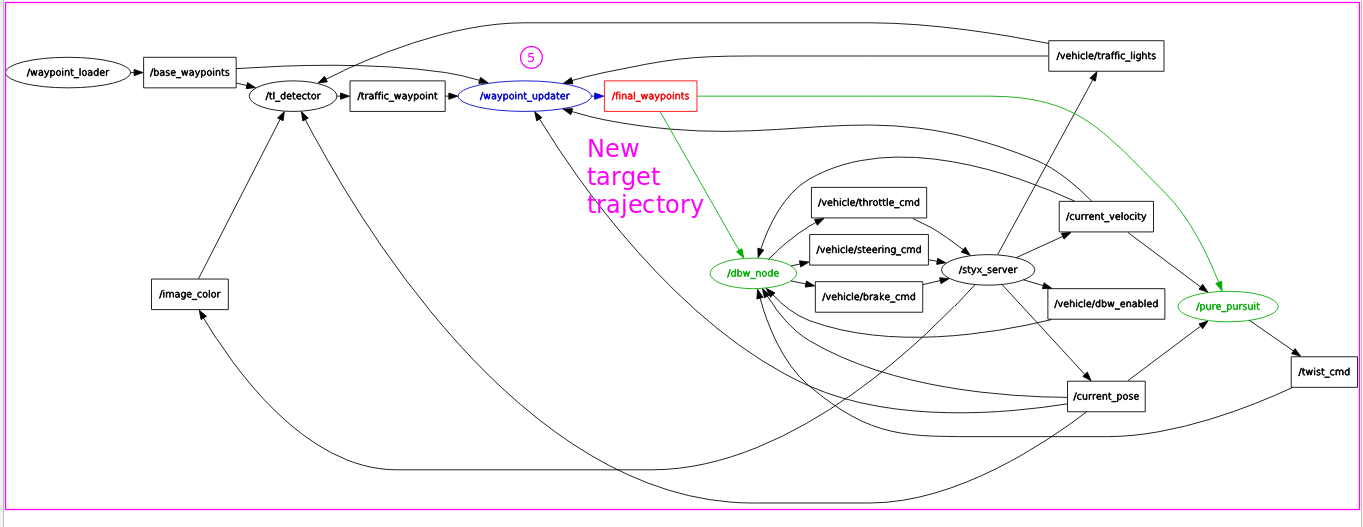
-
New commands for car actuators
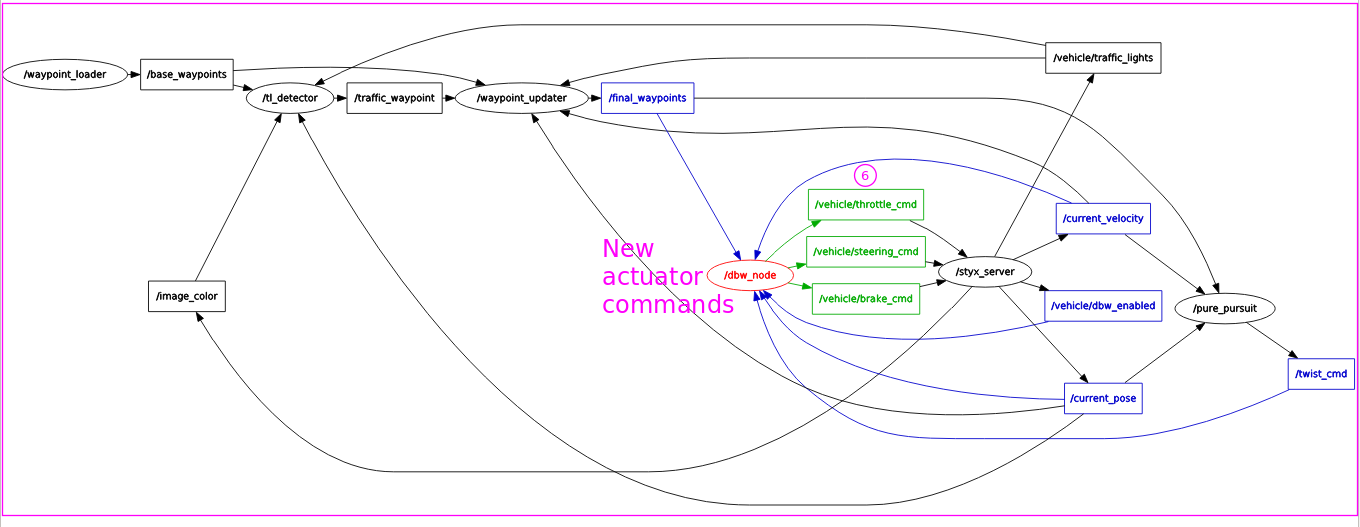
-
See API for more details on above diagrams
7.1 OPTIONAL : How to generate and view Sphinx API







cd <cloned_folder>/ros/src/doc
vim conf.py
vim index.rst
make clean
make html
cd _build/html/
python -m SimpleHTTPServer
cp -r * <cloned_folder>/docs/-
- Smoothly follow waypoints in the simulator.
-
- Stop at traffic lights when needed.
-
- Stop and restart PID controllers depending on the state of /vehicle/dbw_enabled.
-
- Speed Limit: Be sure to respect the speed limit set by the velocity param (km/h) in waypoint_loader

- TODO
This is the project repo for the final project of the Udacity Self-Driving Car Nanodegree: Programming a Real Self-Driving Car. For more information about the project, see the project introduction here.
-
Be sure that your workstation is running Ubuntu 16.04 Xenial Xerus or Ubuntu 14.04 Trusty Tahir. Ubuntu downloads can be found here.
-
If using a Virtual Machine to install Ubuntu, use the following configuration as minimum:
- 2 CPU
- 2 GB system memory
- 25 GB of free hard drive space
The Udacity provided virtual machine has ROS and Dataspeed DBW already installed, so you can skip the next two steps if you are using this.
-
Follow these instructions to install ROS
- ROS Kinetic if you have Ubuntu 16.04.
- ROS Indigo if you have Ubuntu 14.04.
-
- Use this option to install the SDK on a workstation that already has ROS installed: One Line SDK Install (binary)
-
Download the Udacity Simulator.
Build the docker container
docker build . -t capstoneRun the docker file
docker run -p 4567:4567 -v $PWD:/capstone -v /tmp/log:/root/.ros/ --rm -it capstone- Clone the project repository
git clone https://github.com/udacity/CarND-Capstone.git- Install python dependencies
cd CarND-Capstone
pip install -r requirements.txt- Make and run styx
cd ros
rm -rf build
rm -rf devel
catkin_make
source devel/setup.sh
roslaunch launch/styx.launch- Run the simulator
- Download training bag that was recorded on the Udacity self-driving car (a bag demonstraing the correct predictions in autonomous mode can be found here)
- Unzip the file
unzip traffic_light_bag_files.zip- Play the bag file
rosbag play -l traffic_light_bag_files/loop_with_traffic_light.bag- Launch your project in site mode
cd CarND-Capstone/ros
roslaunch launch/site.launch- Confirm that traffic light detection works on real life images