NOTE: Design and code is not fully complete. So use with caution, I am looking for collaborators who can test and improve on design and code...
TetraFlow MMU: A Multi-Material Unit for 3D Printers
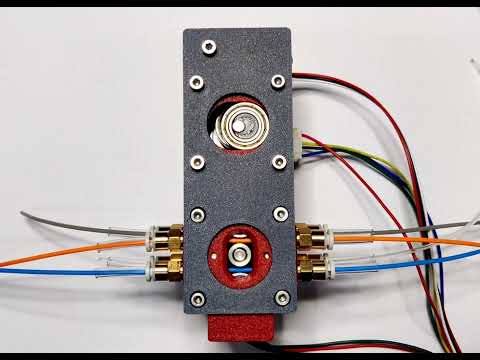
TetraFlow MMU is a 4-color MMU inspired by the innovative 3dChameleon MMU. Utilizing a unique cam design, it seamlessly switches between filaments. The compact and simple design, thanks to the cam mechanism, includes a 4-to-1 Y splitter with an integrated filament sensor. Additionally, the MMU features homing functionality for precise and reliable filament switching. MMU supports both sensorless homing for TMC (TMC2209) drivers and homing using a limit switch.

This is the initial design undergoing refinements. The integration code for 3D printers is still under development.


Firmware is written for SKR Pico V1.0 and can be ported to different board if required.
G-Code Commands:
<G28>: Home command. Calls thehome()function to home the printer.<G1>or<G0>: Movement commands. Extrudes or retracts filament based on the input value. Accepts an optional E variable for filament extrusion/retraction. For example,<G1 E10>moves and extrudes filament by 10 units.<G2>: Arc movement command. Similar to G1 but moves along a curved path in a clockwise direction. Also accepts an optional E variable for filament extrusion.<G900>: Command to park the tool head. Calls theparkToolHead()function.<G901>: Command to unpark the tool head. Calls theunParkToolHead()function.
T-Code Commands:
<T0>,<T1>,<T2>,<T3>...: Tool select commands. Changes the selected tool based on the input value. Calls theUnloadFilament(),ToolSelect(), andLoadFilament()functions accordingly.
S-Code Commands:
<S0>,<S1>,<S2>,<S3>...: Special tool select commands. Similar to T-Code commands but without filament extrusion. Calls theToolSelect()function.
O-Code Commands:
<O1>: Override distance from switch to head. Updates the distance value in themmu_settingobject and saves it to EEPROM.<O2>: Override distance from switch to safe zone. Updates the distance value in themmu_settingobject and saves it to EEPROM.<O3>: Override filament encoder detection length. Updates the value in themmu_settingobject and saves it to EEPROM.<O4>,<O5>,<O6>,<O7>: Override extruder rotation distance for tools T0, T1, T2, T3 respectively. Updates the values in themmu_settingobject and saves them to EEPROM.<O8>: Override stall value for motor A. Updates the stall value in themmu_settingobject, sets it in the motor driver, and saves it to EEPROM.
M-Code Commands:
<M600>: Unload filament command. Unloads filament using theUnloadFilament()function and parks the tool head using theparkToolHead()function.
C-Code Commands:
<C<tool number> V<revolutions>>: Calibrate E steps for the specified tool number and revolutions. Calls theCalibrateESteps()function.