For more information see https://astar.ai.
Youtube Demo Video.
The following steps have been tested and passed on Ubuntu 22.04.
Fisheye Camera Model: C. Mei and P. Rives, Single View Point Omnidirectional Camera Calibration From Planar Grids, ICRA 2007.
Required at leat 4.0. Tested with OpenCV 4.5.5.
mkdir build && cd build
cmake ..
make
./calicam
python calicam.py
To run CaliCam in the LIVE mode, you need to download the calibration parameter file from online. Each CaliCam stereo/mono camera has a UNIQUE parameter file. Please download the corresponding parameter file by following the instructions at https://astar.ai/collections/astar-products.
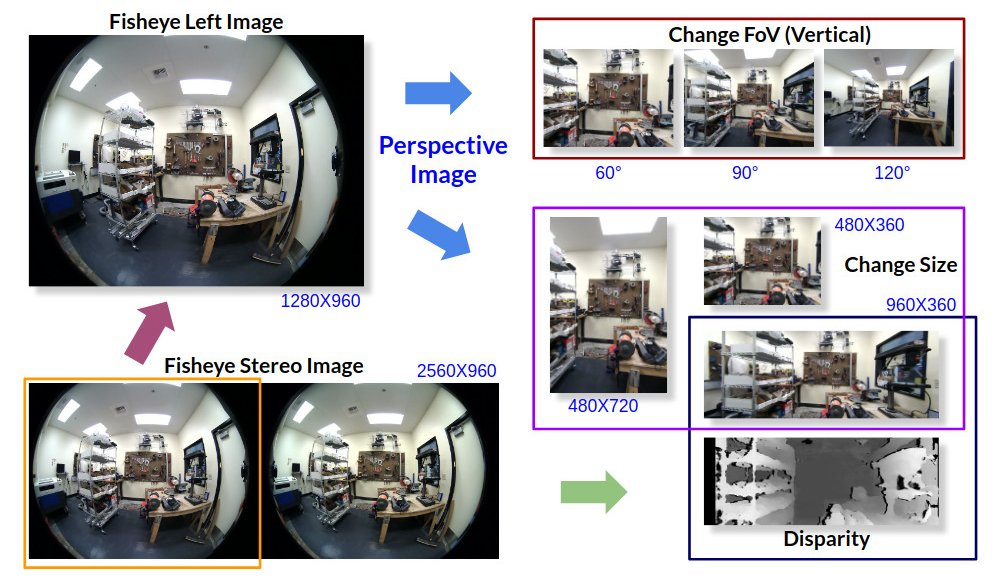
There are 3 trackbars to adjust the vertical FoV, width, and height for the output image.
There are 2 trackbars to adjust the numDisparities and blockSize for OpenCV stereo matching functions.
Press 'q' or 'Esc' key to exit.
To run calicam.cpp in a live mode, please change the variable live to true. Python code does NOT support the live mode.
bool live = true;
and run
./calicam YOUR_CALIBRATION_FILE.yml