- Creators: Andres Ulloa, Travis Emery, Shehan Jayasekera, Timothy Kremers, and Lucas Prilenski
- Supervisors: Dr. Kathleen Lamkin-Kennard, and Art North
- Sponsors: Rochester Institute of Technology, Boeing

The IRA is a inflatable soft robotic arm which is mobile
The IRA system is broken down into 4 subsystems:
- Controls/Software
- Arm/Hand
- [Air Flow](#Air Flow)
- Car
All subsystems contain README.md files which contain instructions for building the subsystem.
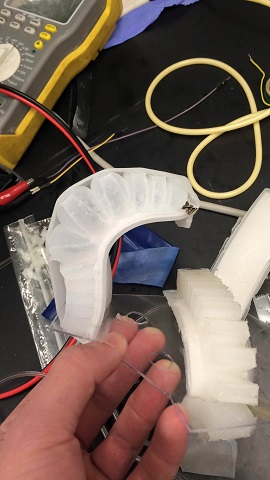
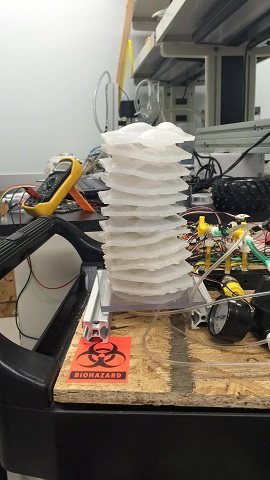
##### Controls/Software - The control system is centered around the [Arduino Mega](https://www.arduino.cc/en/Main/arduinoBoardMega) microcontroller board, with control code written in Arduino c++, and a UI in the form of a [wireless Xbox 360 controller](http://www.xbox.com/en-US/xbox-360/accessories/controllers). We link the Xbox controller to the arduino using the [Arduino USB Host Shield](https://www.arduino.cc/en/Main/ArduinoUSBHostShield) and [Microsoft Xbox 360 Wireless Receiver](http://www.amazon.com/Microsoft-Xbox-Wireless-Receiver-Windows/dp/B000HZFCT2). - User--->Xbox Controller--->Wireless Receiver---->Usb Host Shield--->Arduino--->Subsystems ##### Arm/Hand The Arm/Hand system is the primary focus of the project. - Arm - The arm and hand is made of [4 channels molded into 13 layers using Smooth-on Dragon Skin](http://www.instructables.com/id/Soft-Robots-Make-An-Artificial-Muscle-Arm-And-Gri/?ALLSTEPS). These compartments are adhered together and expand when air pressure is applied. Using a 4 channel system allows for 3-dimensional control of the arm by the user.

- Hand
- The hand is created by attaching 3 PneuNets Bending Actuators to the PlexiGlass hand base which is attached to the end of the arm. Pressure is then fed into the actuators causing them to close. Small rubber bands are attatched to the actuators to allow retraction.