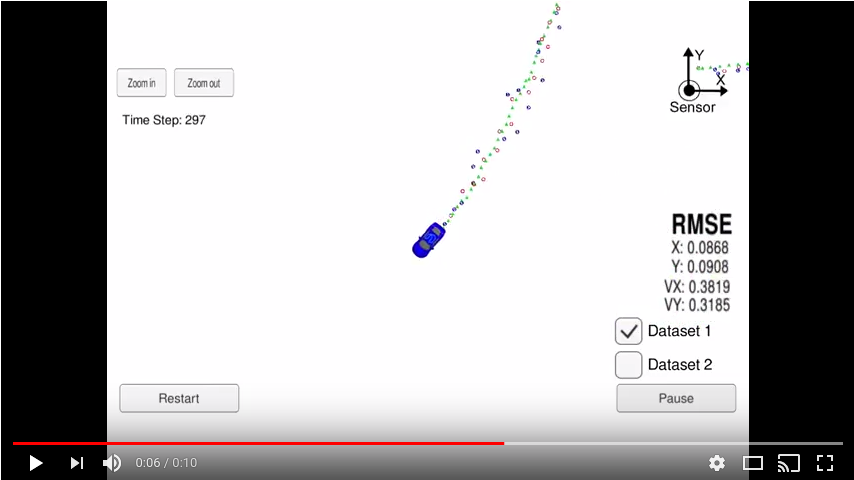
This code utilize an Unscented Kalman Filter to estimate the state of a moving object of interest with noisy lidar and radar measurements.
- cmake >= 3.5
- All OSes: click here for installation instructions
- make >= 4.1
- Linux: make is installed by default on most Linux distros
- Mac: install Xcode command line tools to get make
- Windows: Click here for installation instructions
- gcc/g++ >= 5.4
- Linux: gcc / g++ is installed by default on most Linux distros
- Mac: same deal as make - [install Xcode command line tools]((https://developer.apple.com/xcode/features/)
- Windows: recommend using MinGW
This project involves the Udacity Term 2 Simulator which can be downloaded here
- Clone this repo.
$ git clone https://github.com/Heych88/udacity-sdcnd-unscented-kalman-filter.git- This repository includes two files that can be used to set up and intall uWebSocketIO for either Linux or Mac systems. For windows you can use either Docker, VMware, or even Windows 10 Bash on Ubuntu to install uWebSocketIO.
Install uWebSocketIO by running the script
For Linux
bash install-ubuntu.sh
For Mac
sh install-mac.sh
- ./UnscentedKF
If the above fails, install intall uWebSocketIO seperatly, then build and ran by doing the following from the project top directory.
- mkdir build
- cd build
- cmake ..
- make
- ./UnscentedKF
The following assumes the Build Instructions was followed and produced no errors.
Download and extract the simulator.
- Navigate to the extrated simulator directory and run the simulator.
- Select the settings best for your computer and click ok.
- In a terminal window run the UnscentedKF executable
$ cd <local directory>/udacity-sdcnd-unscented-kalman-filter
$ ./UnscentedKFThis project is licensed under the MIT License - see the LICENSE.md file for details.