这是一个Kalman Filter的程序,内含状态量为标量和二维矢量的C程序实现,详见kalman_filter.c与kalman_filter.h。
程序使用的数据类型是float,程序测试主要在PC上和TMS320C6000的嵌入式平台。当然,因为是C程序,移植到其它的平台那是特别的方便!
fixed_test1.h``fixed_test2.h以及free_test07.h包含了测试用的数据。test_kalman_filter.c只是一个包含main函数测试程序。
环境要求:gcc的C编译环境,当然最好有Matlab环境可以非常直观方便的看到滤波效果。
-
在
test_kalman_filter.c中修改要使用Kalman滤波的数据,只要修改include包含即可//#include "fixed_test1.h" #include "fixed_test2.h" //#include "free_test07.h" -
推荐使用已经写好的Makefile文件进行编译执行,在gcc环境中,依次执行以下命令:
make " gcc编译程序 make run " 运行程序之后数据和滤波结果会存储到当前目录的result.txt文件中(第一列为原数据,第二列为滤波结果)
-
运行Matlab,执行脚本
plot_result.m,选择result.txt文件即可查看滤波效果,下面为使用标量滤波的效果,卡尔曼滤波器使突变的数据变得平滑。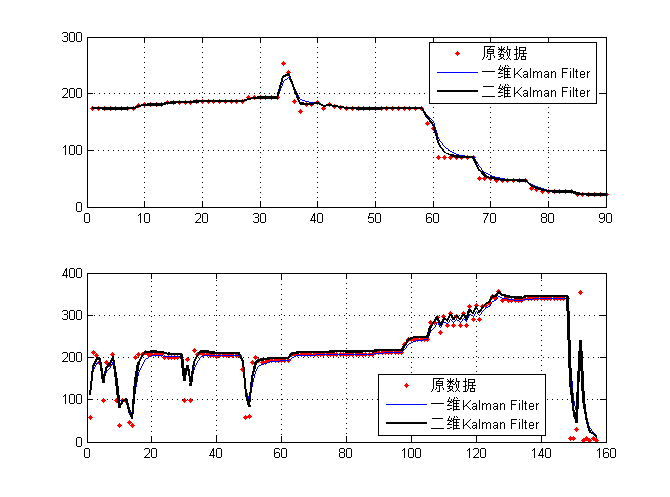

实际使用时只需要将kalman_filter.c与kalman_filter.h拷贝到工程目录中即可,调用的步骤一律按照:
kalman_init(..., init_x, init_p)
kalman_filter(..., z_measure)
本程序未包含自适应调参,因此请根据实际应用环境仔细调整,很重要。关于调参有很多可研究的地方,主要需要设定的参数如下:
- init_x:待测量的初始值,如有中值一般设成中值(如陀螺仪)
- init_p:后验状态估计值误差的方差的初始值
- q:预测(过程)噪声方差
- r:测量(观测)噪声方差。以陀螺仪为例,测试方法是:保持陀螺仪不动,统计一段时间内的陀螺仪输出数据。数据会近似正态分布,按3σ原则,取正态分布的(3σ)^2作为r的初始化值。
其中q和r参数尤为重要,一般得通过实验测试得到。
关于Kalman滤波的详细公式推导参见论文An Introduction to the Kalman Filter.
Email: xiahouzuoxin@163.com
Copyright (C) MICL,USTB