Part proof-of-concept, part functional prototype, HAMUX is designed to bridge modern AI architectures and Hopfield Networks.
HAMUX: A Hierarchical Associative Memory User eXperience.
HAMUX fully captures the the energy fundamentals of Hopfield Networks and enables anyone to:
-
🧠 Build DEEP Hopfield nets
-
🧱 With modular ENERGY components
-
🏆 That resemble modern DL operations
Every architecture built using HAMUX is a dynamical system guaranteed to have a tractable energy function that converges to a fixed point. Our deep Hierarchical Associative Memories (HAMs) have several additional advantages over traditional Hopfield Networks (HNs):
| Hopfield Networks (HNs) | Hierarchical Associative Memories (HAMs) |
|---|---|
| HNs are only two layers systems | HAMs connect any number of layers |
| HNs model only simple relationships between layers | HAMs model any complex but differentiable operation (e.g., convolutions, pooling, attention, |
| HNs use only pairwise synapses | HAMs use many-body synapses (which we denote HyperSynapses) |
HAMUX is a hypergraph of 🌀neurons connected via 🤝hypersynapses, an abstraction sufficiently general to model the complexity of connections used in modern AI architectures.
HAMUX defines two fundamental building blocks of energy: the 🌀neuron
layer and the 🤝hypersynapse (an abstraction of a pairwise synapse
to include many-body interactions) connected via a
hypergraph. It is a
fully dynamical system, where the “hidden state”
where
$$ \mathbf{x}_l^{(t+1)} = \mathbf{x}l^{(t)} - \frac{dt}{\tau} \nabla{\mathbf{g}_l}E(t)$$
HAMUX handles all the complexity of scaling this fundamental update equation to many layers and hyper synapses. In addition, it provides a framework to:
- Implement your favorite Deep Learning operations as a HyperSynapse
- Port over your favorite activation functions as Lagrangians
- Connect your layers and hypersynapses into a HAM (using a hypergraph as the data structure)
- Inject your data into the associative memory
- Automatically calculate and descend the energy given the hidden states at any point in time
Use these features to train any hierarchical associative memory on your own data! All of this made possible by JAX.
The examples/ subdirectory contains a (growing) list of examples on
how to apply HAMUX on real data.
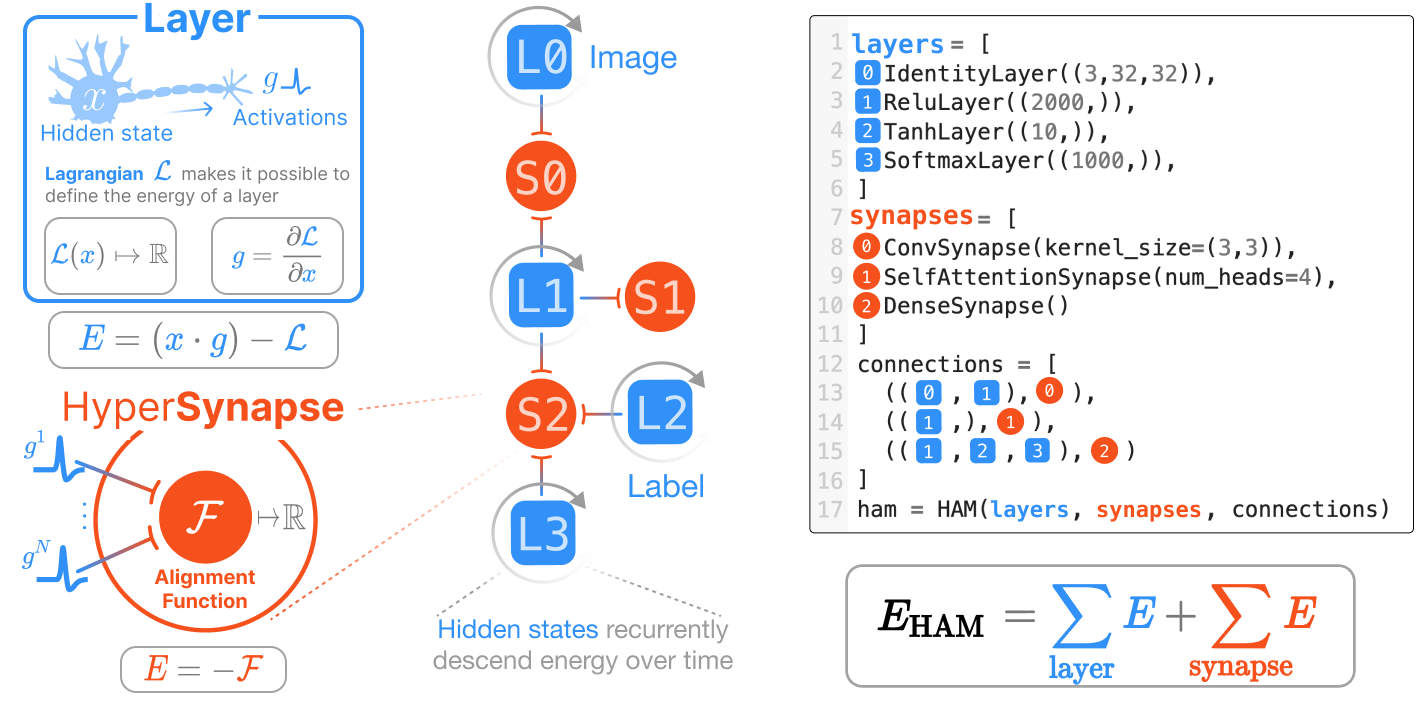
Neuron layers are the recurrent unit of a HAM; that is, 🌀neurons keep a state that changes over time according to the dynamics of the system. These states always change to minimize the global energy function of the system.
For those of us familiar with traditional Deep Learning architectures,
we are familiar with nonlinear activation functions like the ReLU and
SoftMax. A neuron layer in HAMUX is exactly that: a nonlinear
activation function defined on some neuron. However, we need to express
the activation function as a convex Lagrangian function
We need to define our activation layer in terms of the Lagrangian of
the ReLU instead of the ReLU itself. Extending this constraint to other
nonlinearities makes it possible to define the scalar energy for any
neuron in a HAM. It turns out that many activation functions used in
today’s Deep Learning landscape are expressible as a Lagrangian. HAMUX
is “batteries-included” for many common activation functions including
relus, softmaxes, sigmoids, LayerNorms, etc. See our
documentation on
Lagrangians for
examples on how to implement efficient activation functions from
Lagrangians in JAX. We show how to turn Lagrangians into usable energy
building blocks in our documentation on neuron
layers.
A 🤝hypersynapse ONLY sees activations of connected 🌀neuron layers. Its one job: report HIGH ⚡️energy if the connected activations are dissimilar and LOW ⚡️energy when they are aligned. Hypersynapses can resemble convolutions, dense multiplications, even attention… Take a look at our documentation on (hyper)synapses.
ConvLayers and NormalizationLayers. In HAMUX, these would be more appropriately called ConvSynapses and NormalizationLagrangians.
From pip:
pip install hamux
If you are using accelerators beyond the CPU you will need to
additionally install the corresponding jax and jaxlib versions
following their
documentation. E.g.,
pip install --upgrade "jax[cuda]" -f https://storage.googleapis.com/jax-releases/jax_cuda_releases.html
From source:
After cloning:
cd hamux
conda env create -f environment.yml
conda activate hamux
pip install --upgrade "jax[cuda]" -f https://storage.googleapis.com/jax-releases/jax_cuda_releases.html # If using GPU accelerator
pip install -e .
pip install -r requirements-dev.txt # To run the examples
import hamux as hmx
import jax.numpy as jnp
import jax
import jax.tree_util as jtuWe can build a simple 4 layer HAM architecture using the following code
layers = [
hmx.TanhLayer((32,32,3)), # e.g., CIFAR Images
hmx.SigmoidLayer((11,11,1000)), # CIFAR patches
hmx.SoftmaxLayer((10,)), # CIFAR Labels
hmx.SoftmaxLayer((1000,)), # Hidden Memory Layer
]
synapses = [
hmx.ConvSynapse((3,3), strides=3),
hmx.DenseSynapse(),
hmx.DenseSynapse(),
]
connections = [
([0,1], 0),
([1,3], 1),
([2,3], 2),
]
rng = jax.random.PRNGKey(0)
param_key, state_key, rng = jax.random.split(rng, 3)
states, ham = hmx.HAM(layers, synapses, connections).init_states_and_params(param_key, state_key=state_key);Notice that we did not specify any output channel shapes in the
synapses. The desired output shape is computed from the layers connected
to each synapse during hmx.HAM.init_states_and_params.
We have two fundamental objects: states and ham. The ham object
contains the connectivity structure of the HAM (e.g.,
layer+hypersynapse+hypergraph information) alongside the parameters
of the network. The states object is a list of length nlayers where
each item is a tensor representing the neuron states of the
corresponding layer.
assert len(states) == ham.n_layers
assert all([state.shape == layer.shape for state, layer in zip(states, ham.layers)])We make it easy to run the dynamics of any HAM. Every forward function
is defined external to the memory and can be modified to extract
different memories from different layers, as desired. The general steps
for any forward function are:
- Initialize the dynamic states
- Inject an initial state into the system
- Run dynamics, calculating energy gradient at every point in time.
- Return the layer state/activation of interest
def fwd(model, x, depth=15, dt=0.1):
"""Assuming a trained HAM, run association with the HAM on batched inputs `x`"""
# 1. Initialize model states at t=0. Account for batch size
xs = model.init_states(x.shape[0])
# Inject initial state
xs[0] = x
energies = []
for i in range(depth):
energies.append(model.venergy(xs)) # If desired, observe the energy
dEdg = model.vdEdg(xs) # Calculate the gradients
xs = jtu.tree_map(lambda x, stepsize, grad: x - stepsize * grad, xs, model.alphas(dt), dEdg)
# Return probabilities of our label layer
probs = model.layers[-2].activation(xs[-2])
return jnp.stack(energies), probsbatch_size=3
x = jax.random.normal(jax.random.PRNGKey(2), (batch_size, 32,32,3))
energies, probs = fwd(ham, x, depth=20, dt=0.3)
print(probs.shape) # batchsize, nclasses
assert jnp.allclose(probs.sum(-1), 1)(3, 10)

We use JAX’s autograd to descend the energy function of our system AND the loss function of our task. The derivative of the energy is always taken wrt to our states; the derivative of the loss function is always taken wrt our parameters. During training, we change our parameters to optimize the Loss Function. During inference, we assume that parameters are constant.
Autograd for Descending Energy
Every HAM defines the
energy function for our system, which is everything we need to compute
memories of the system. Naively, we can calculate
stepsize = 0.01
fscore_naive = jax.grad(ham.energy)
next_states = jax.tree_util.tree_map(lambda state, score: state - stepsize, states, fscore_naive(states))But it turns out we improve the efficiency of our network if we instead
take
stepsize = 0.01
def fscore_smart(xs):
gs = ham.activations(xs)
return jax.tree_util.tree_map(lambda x, nabla_g_Esyn: x + nabla_g_Esyn, xs, jax.grad(ham.synapse_energy)(gs))
next_states = jax.tree_util.tree_map(lambda state, score: state - stepsize, states, fscore_smart(states))Read our extended abstract on OpenReview: HAMUX: A Universal Abstraction for Hierarchical Hopfield Networks
Work is a collaboration between the MIT-IBM Watson AI Lab and the PoloClub @ GA Tech. - Ben Hoover (IBM & GATech) - Polo Chau (GATech) - Hendrik Strobelt (IBM) - Dmitry Krotov (IBM)