RoboDK simulation with robot and vision (2d) pick and place for AAU (Aalborg Univserity) Robot Vision Course. https://moduler.aau.dk/course/2020-2021/ESNVGISK2K2?lang=en-GB
- Color Segementation
- Detection
- Jupyter Visu
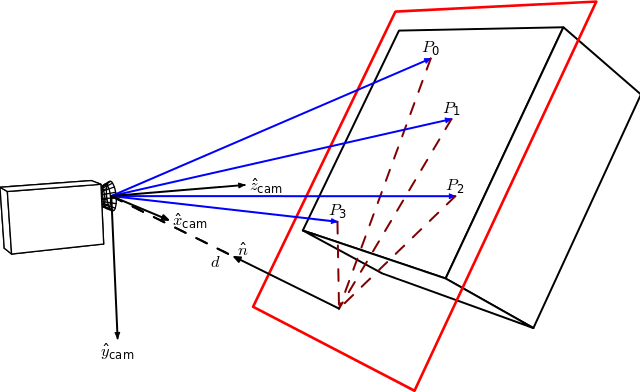
- 3D Calibration
- Connect with RoboDK Camera
- Move Robot
- Build Simpsons
- Plug Everything together





Trace Contours, Add Discrete Colors to each Contour Object, Estimate Polygon, Use Polygon Corners to Calculate Orientation, Use Homography Transform to get World Coordinates from Pixel Coordinates



https://user-images.githubusercontent.com/42101377/117690134-cd388980-b1ba-11eb-881e-b1d171341d41.mp4 https://www.youtube.com/watch?v=betZsiYEAE0