Using pytorch to implement Deep Deterministic Policy Gradient(DDPG).
- python 3.6
- pytorch 0.4+
- tensorboard
- gym
main.py --train --env MountainCarContinuous-v0 --cuda
Parameters:
| Parameters | description |
|---|---|
| --train | train model |
| --test | test model |
| --retrain | retrain model |
| --retrain_model | retrain model path |
| --env | gym environment name |
| --episodes | train episodes |
| --eps_decay | noise epsilon decay |
| --cuda | use cuda |
| --model_path | if test mode, import the model |
| --record | record the video |
| --record_ep_interval | record episodes interval |
| --checkpoint | use model checkpoint |
| --checkpoint_interval | checkpoint interval |
(more parameters see the file)
You can use the tensorboard to see the training.
tensorboard --logdir=out/MountainCarContinuous-v0
You can test your model with --test like this:
main.py --test --env MountainCarContinuous-v0 --model_path out/MountainCarContinuous-v0-run0
It will render graphical interface.
It turns out that tuning parameters are very important, especially eps_decay. I use the simple linear noise decay such as epsilon -= eps_decay every episode.
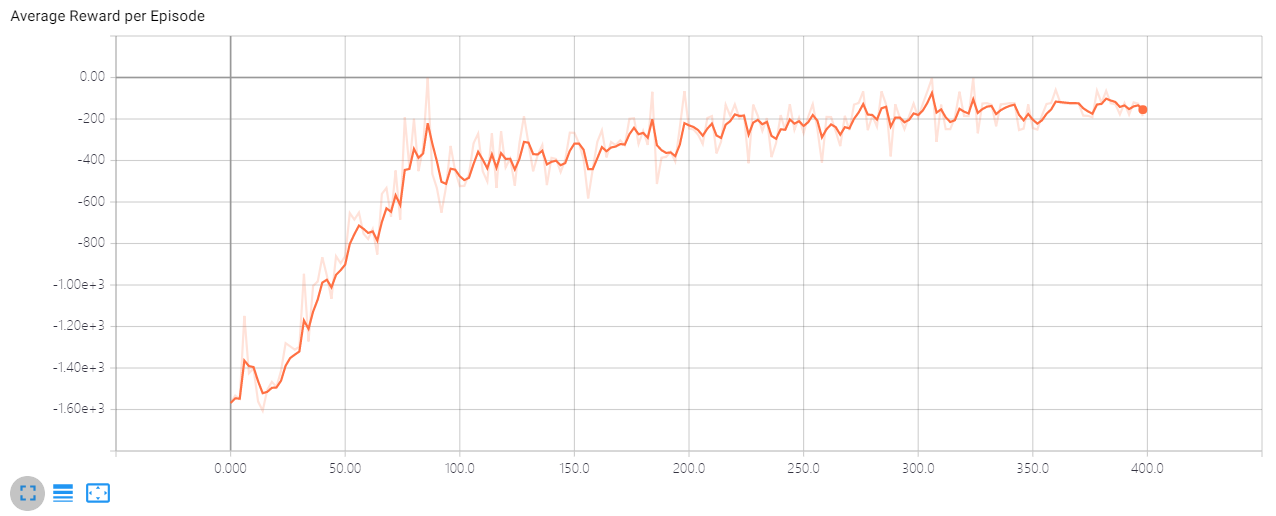
- Pendulum-v0
main.py --train --env Pendulum-v0 --cuda --eps_decay 0.01
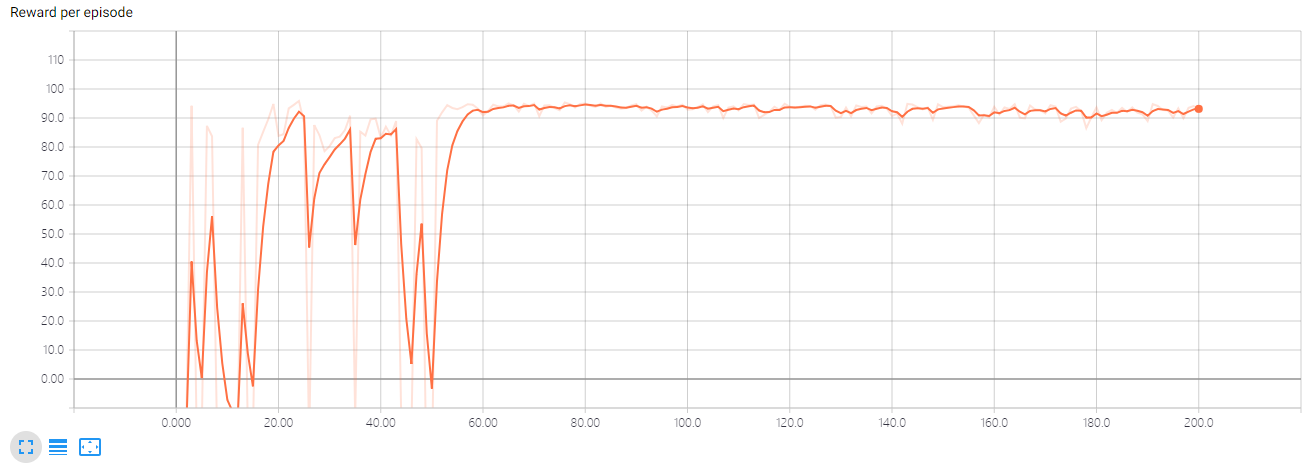
- MountainCarContinuous-v0
main.py --train --env MountainCarContinuous-v0 --cuda --eps_decay 0.001