Predicting PM10 Air Particles Using Recurrent Neural Networks (RNN, GRU, LSTM)
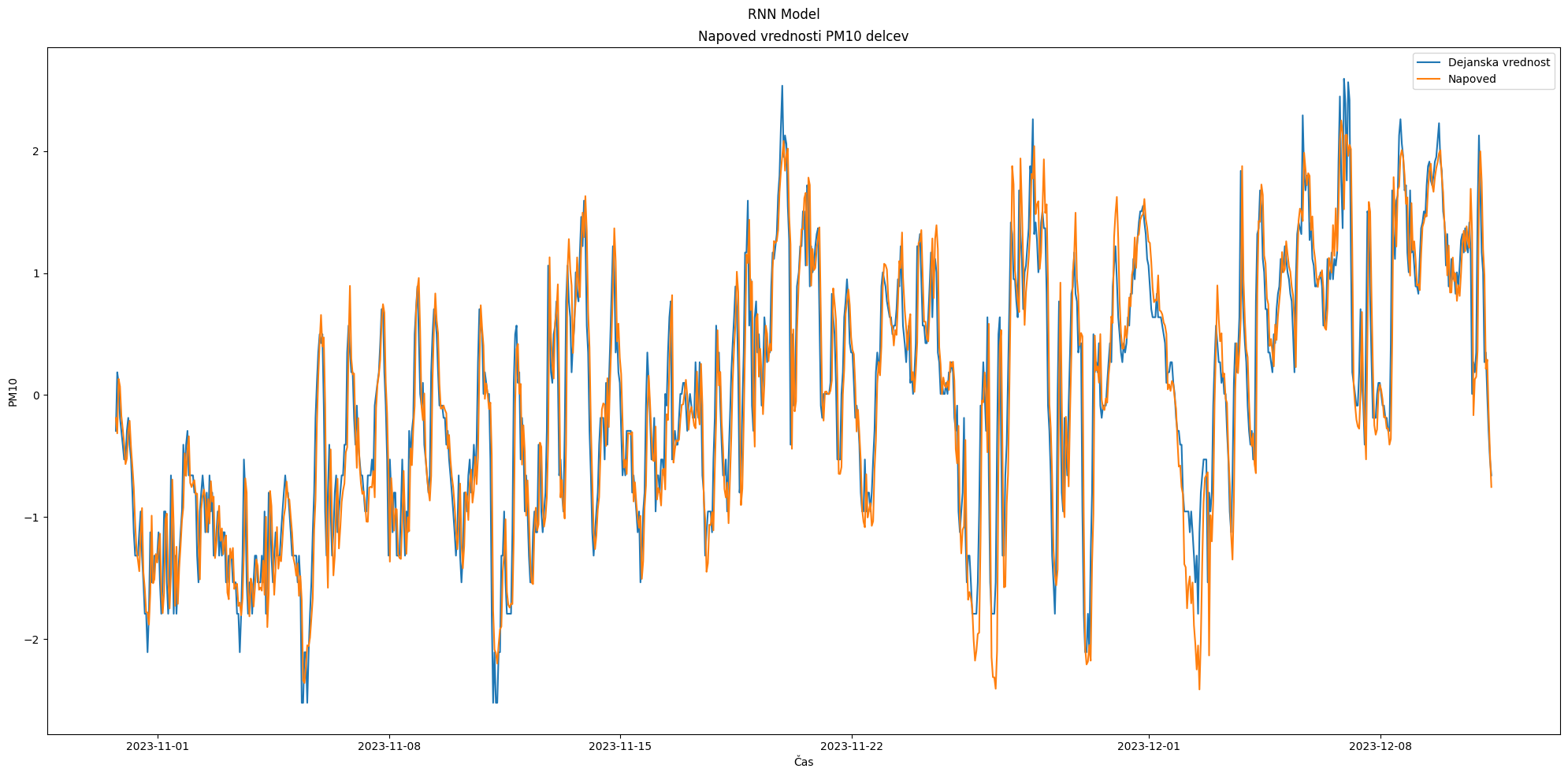
model_rnn = Sequential([
SimpleRNN(128, input_shape=input_shape, return_sequences=True),
Dropout(0.2),
SimpleRNN(64, return_sequences=True),
Dropout(0.2),
SimpleRNN(64),
Dense(64, activation='relu'),
Dense(1)
])
model_rnn.compile(optimizer=Adam(learning_rate=0.0004), loss='mean_squared_error')
early_stopping = EarlyStopping(monitor='val_loss', patience=10, restore_best_weights=True)
history_rnn = model_rnn.fit(X_train, y_train, epochs=100, validation_split=0.2, verbose=1, callbacks=[early_stopping])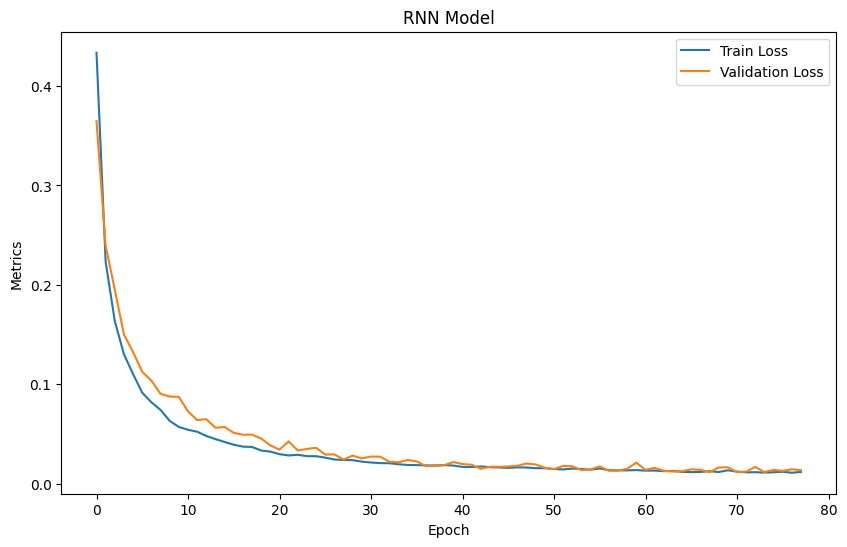
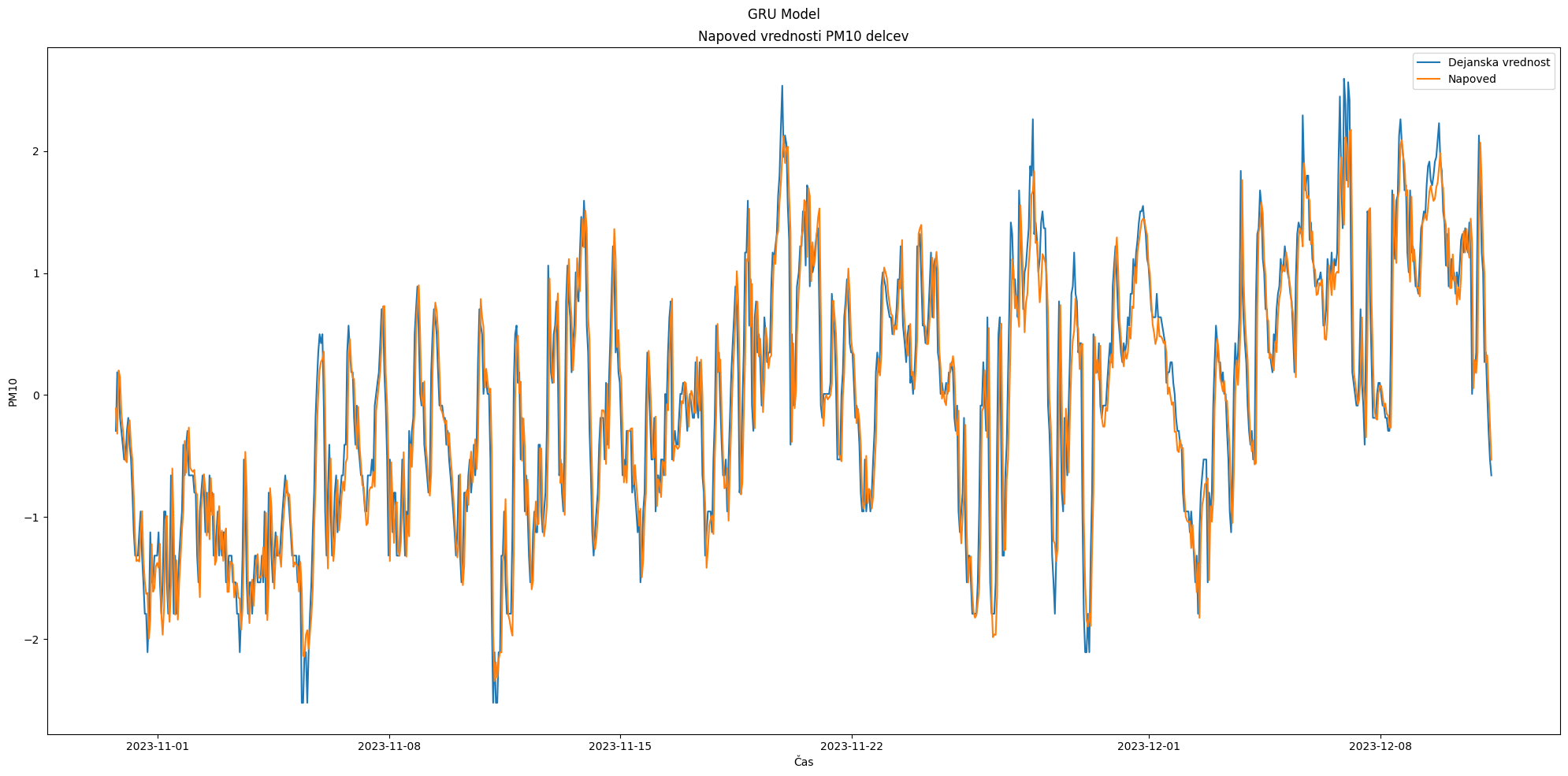
model_gru = Sequential([
GRU(128, input_shape=input_shape, return_sequences=True),
Dropout(0.2),
GRU(64, return_sequences=True),
Dropout(0.2),
GRU(32),
Dense(32, activation='relu'),
Dense(1)
])
model_gru.compile(optimizer=Adam(learning_rate=0.0004), loss='mean_squared_error')
early_stopping = EarlyStopping(monitor='val_loss', patience=10, restore_best_weights=True)
history_gru = model_gru.fit(X_train, y_train, epochs=100, validation_split=0.2, verbose=1, callbacks=[early_stopping])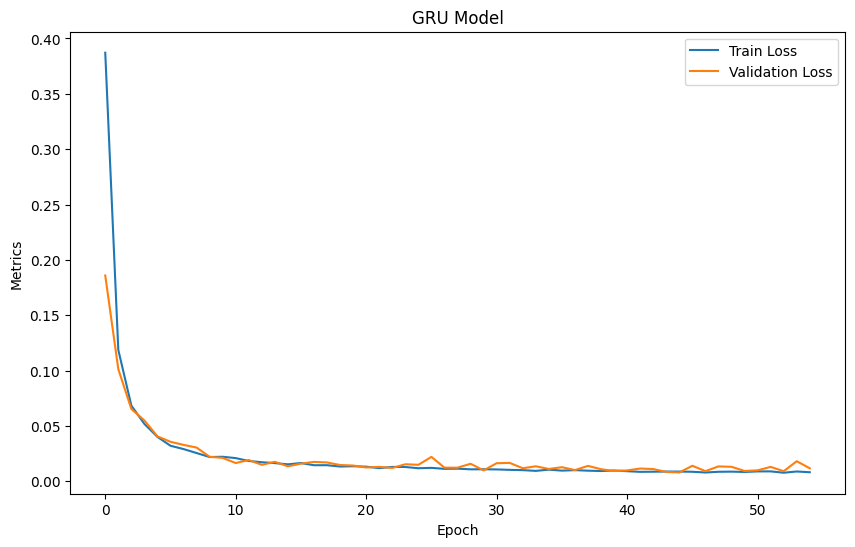
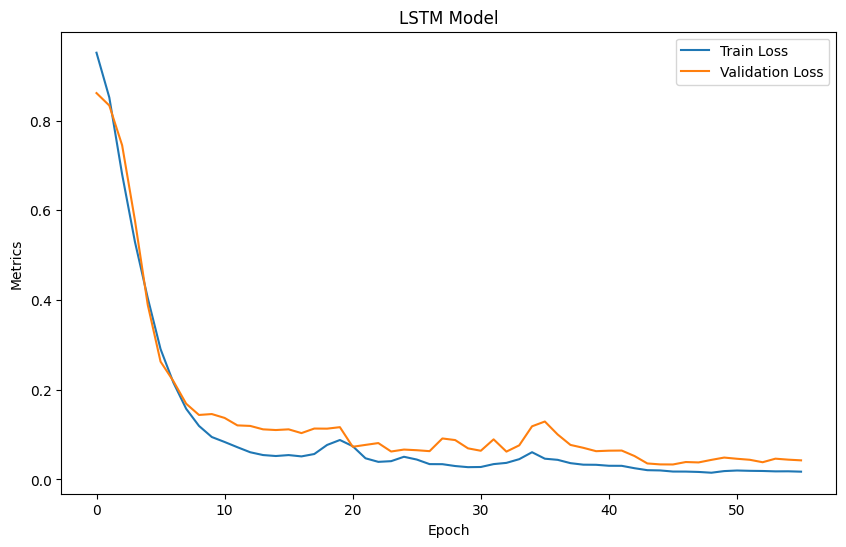
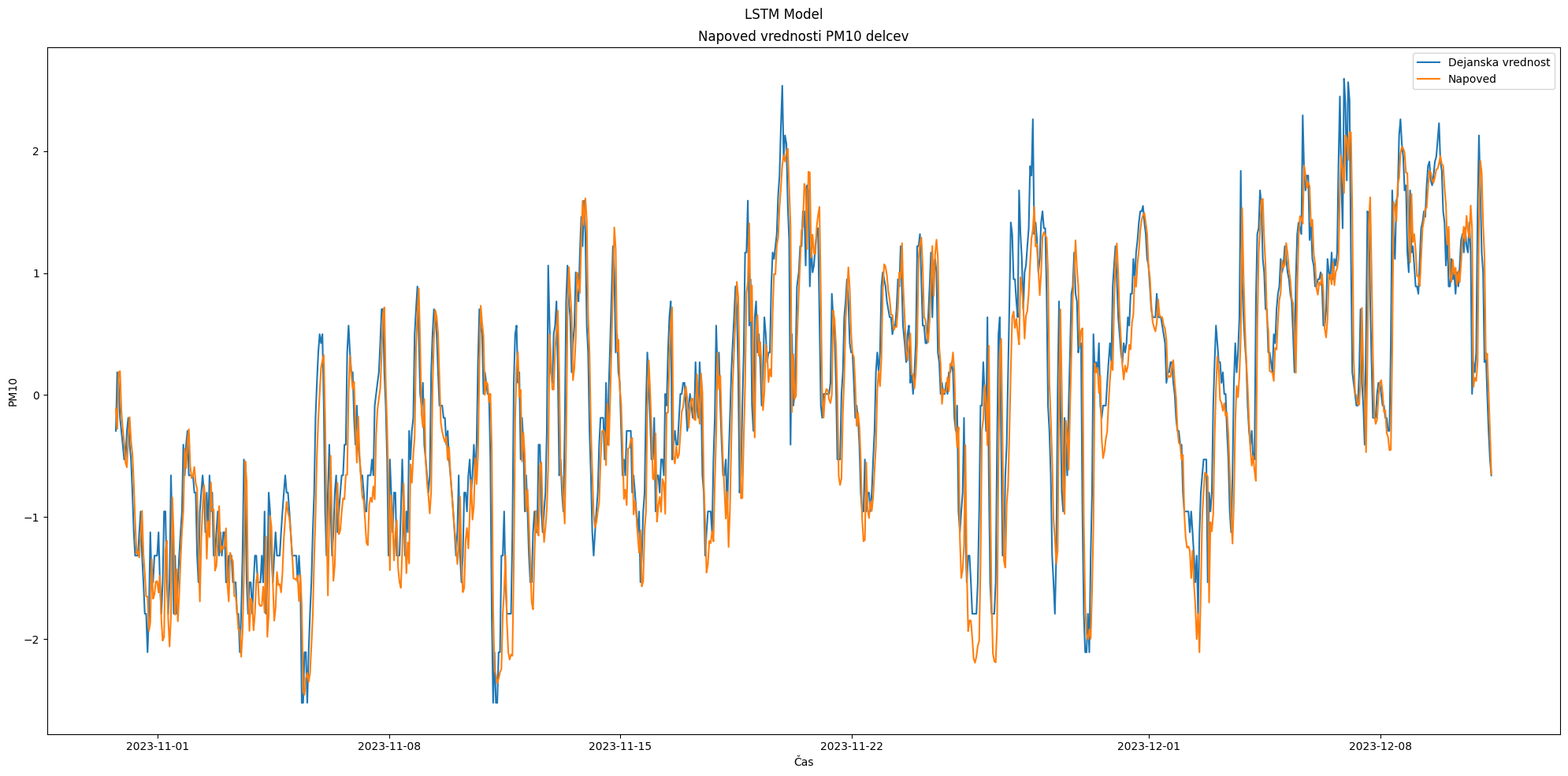
model_lstm = Sequential([
LSTM(128, input_shape=input_shape, return_sequences=True),
Dropout(0.2),
LSTM(64, return_sequences=True),
Dropout(0.2),
LSTM(32),
Dense(32, activation='relu'),
Dense(1)
])
model_lstm.compile(optimizer=Adam(learning_rate=0.0004), loss='mean_squared_error')
early_stopping = EarlyStopping(monitor='val_loss', patience=10, restore_best_weights=True)
history_lstm = model_lstm.fit(X_train, y_train, epochs=100, validation_split=0.2, verbose=1, shuffle=False, callbacks=[early_stopping])