A desire to create a standalone synthesizer that utilized software synthesis and a unique gestural input method led to the development of the airCV hardware platform.
This device was realized during the semester and was completed just before this project began to take shape. In fact, a symbiosis of the two ideas formed as the class provided the tools necessary to create a custom synthesizer that would run on standard hardware but allow for the automation of a piece using algorithms. This, combined with the flexibility of Java, led to experimentation and, finally, the creation of SPAAAAAAAAAAACE. This piece was also the result of a deep admiration of science fiction that focuses on living in the cold and lonely void. The mystery of the unknown and the desire to explore led to many of the ideas for this composition.
The realization of a radio wave as the subject of this composition came about when I was experimenting with Jsyn unit generators in Syntona. Once the main sound was chosen, others were created around the central idea of a static-filled radio signal travelling through space to where it all began.
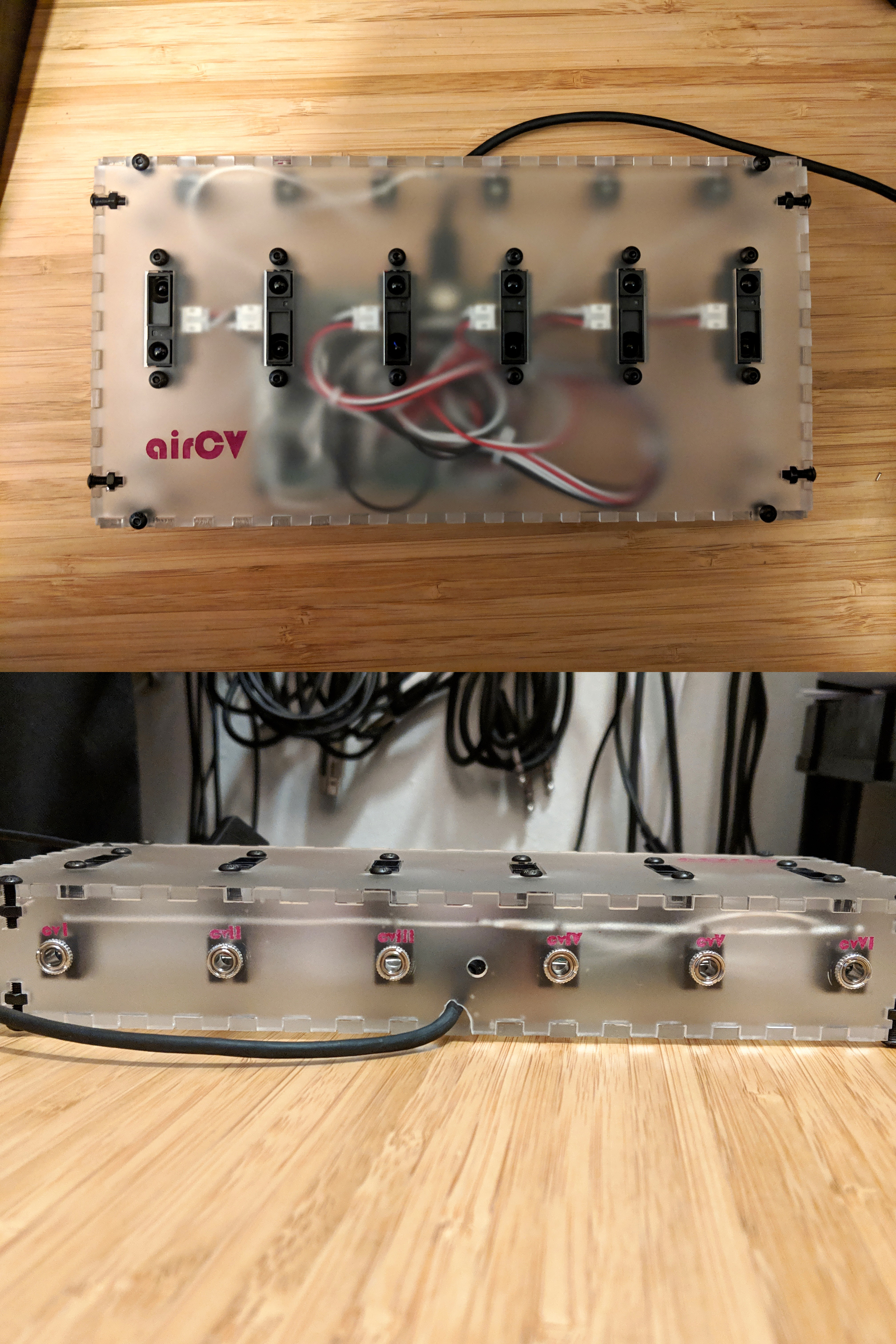
The hardware consists of two infrared distance sensors (Sharp GP2Y0A21YK) that are connected to a Teensy 3.2 microcontroller. The microcontroller has been programmed so that it appears as a general MIDI controller device when plugged into the USB port of a computer. The code on the microcontroller works based on three events: an actuation point, a release point, and a measurement of the distance between the release point and the sensor.
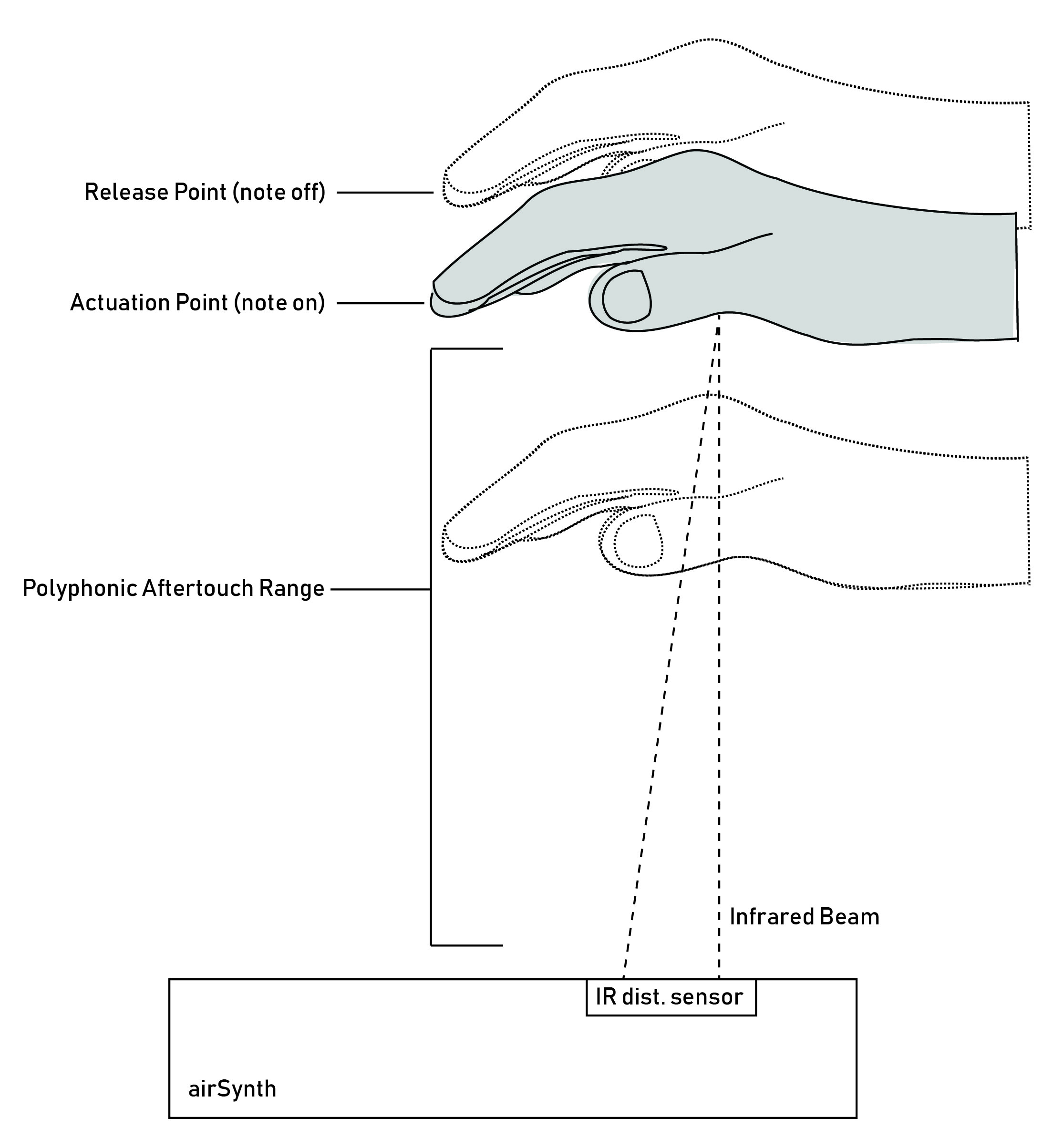
When the infrared distance sensor detects an object reaching a certain distance towards it, the actuation point has been reached and a “note ON” message is sent via MIDI. As the object approaches the sensor, the values are read, converted to a value between 0-127, then transmitted as polyphonic aftertouch messages to the computer. When the object retreats far enough away from the infrared distance sensor, a release point is triggered and a “note OFF” message is sent through MIDI. In addition to the sensors, the controller contains two momentary switches. When pressed, these buttons send a MIDI “note ON” message then a “note OFF” message upon release.
Initially, the goal was to make the hardware an all-in-one device that contained the midi controller along with a Raspberry Pi computer that ran the Java software. This device, dubbed the airCV, was created using a laser cut case that housed all of the equipment discussed above. However, it was discovered during the composition process that the Raspberry Pi was not powerful enough to output all of the voices simultaneously. Therefore, the Raspberry Pi was removed and the MIDI controller was plugged into a USB port on a Windows laptop for the final performance.
The Java application consists of four parts: the main program, a MIDI interpreter, a voice controller, and a composition controller. The MIDI interpreter receives the MIDI input then acts upon the MIDI messages that are received from the USB controller. It may trigger and control a voice directly using the voice controller or direct aspects of the piece using the composition controller.
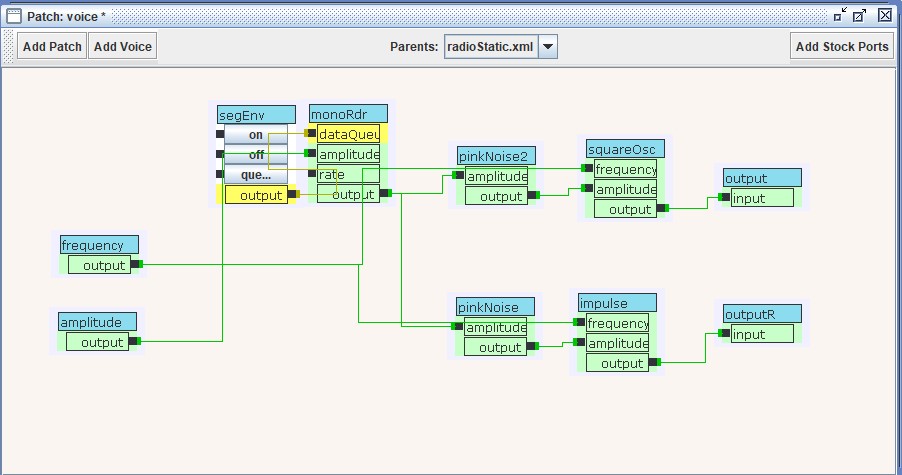
SPAAAAAAAAAAACE utilizes four custom voices that were created in Syntona: RadioStatic, RedShift, StarTwinkle, and SuperSaw. RadioStatic utilizes two pink noise generators that modulate the amplitude of a square wave and an impulse unit generator. The frequency of both the square wave and impulse unit generators can be adjusted externally. This creates a sound that emulates a radio that is attempting to hone in on a signal but never obtains a clear “lock” onto the signal.
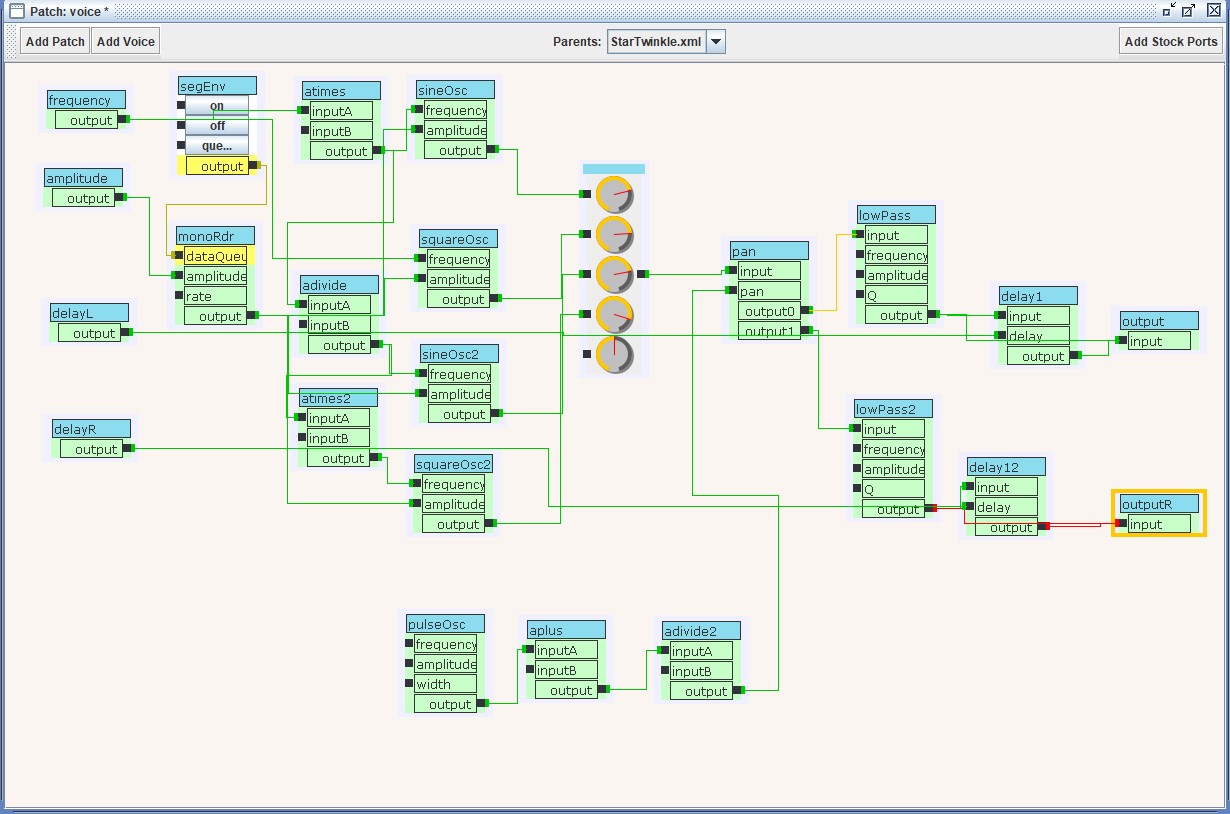
StarTwinkle mixes several sine and square wave unit generators with an adjustable delay for each stereo channel. With a quick attack and release time, it produces a slightly “glitched” sound in the higher registers.
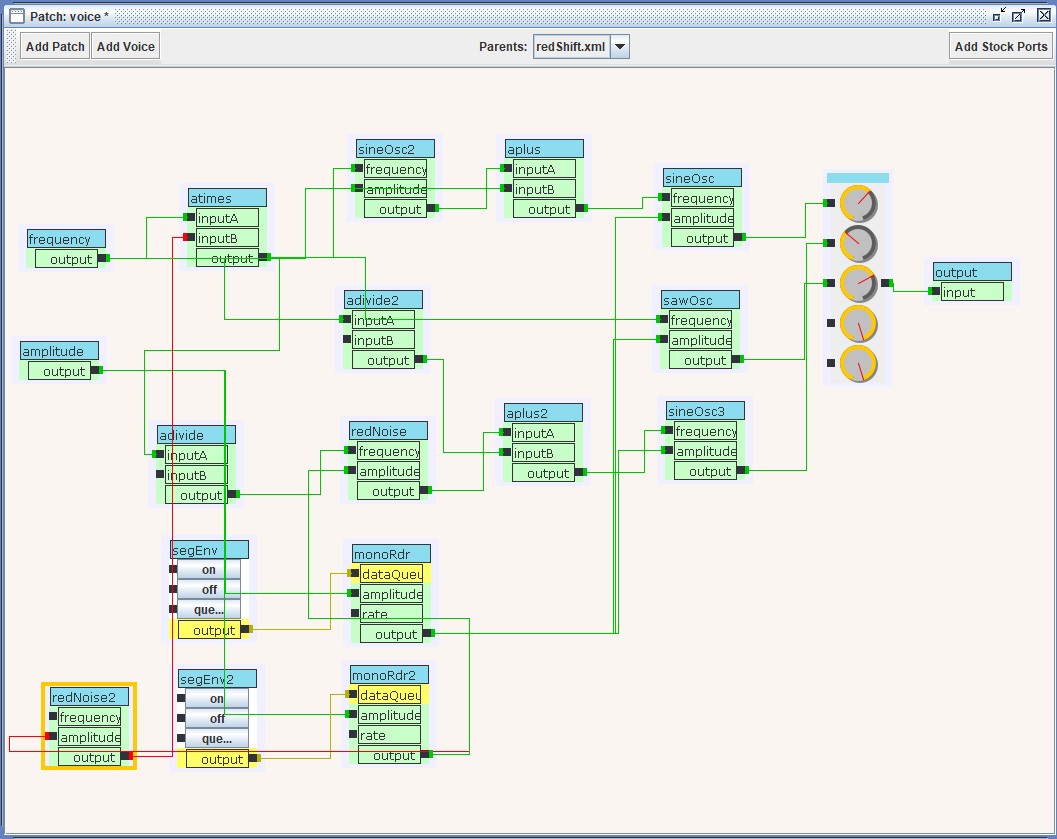
RedShift utilizes a couple of red noise unit generators and a sine oscillator to modulate sine and saw waves. The resulting sound is a slightly noisy voice with several “whoop whoop” sounds that seemingly appear from nowhere.
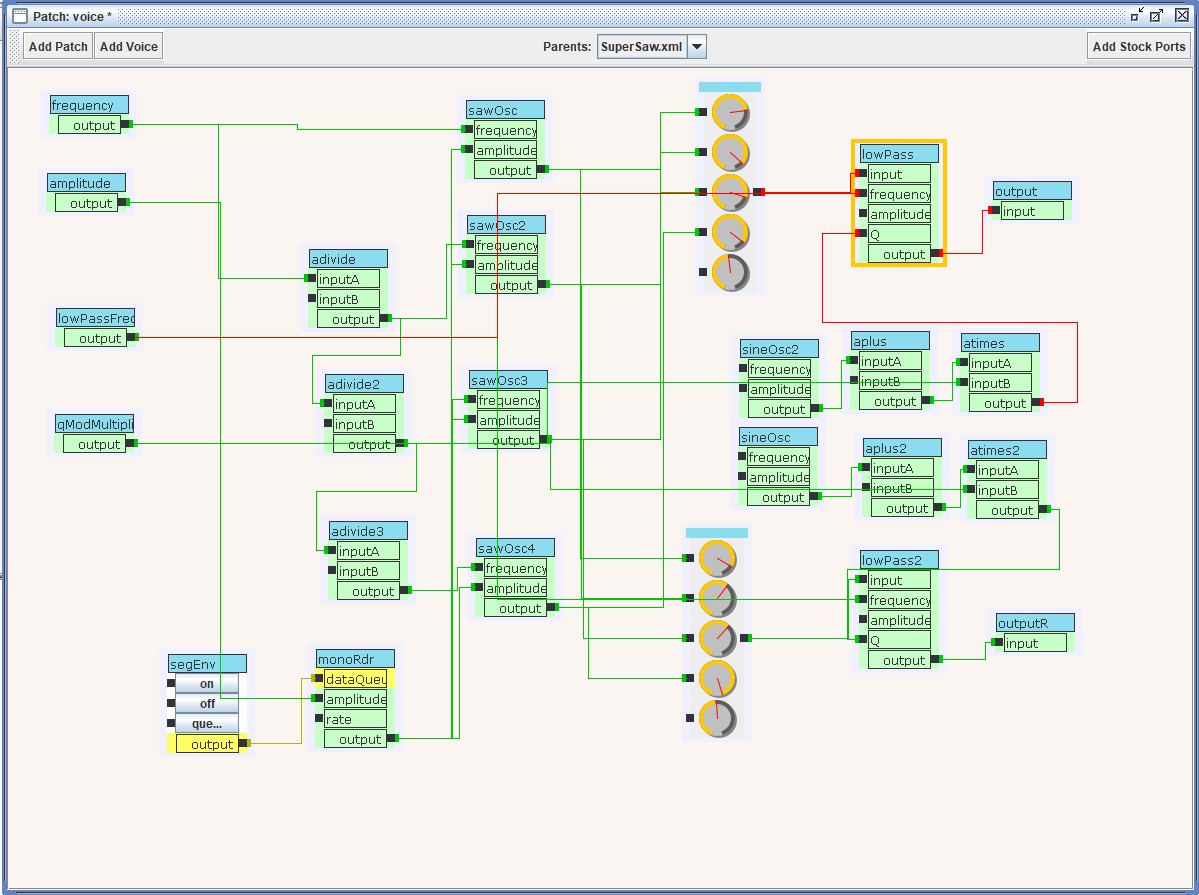
The SuperSaw voice contains a series of saw oscillators that are placed in different, but slightly out-of-tune, octaves. In addition, two sine waves are used to modulate the Q control on two low-pass filters. A multiplier can be adjusted externally to create more or less modulation. This voice has a rich sound that is reminiscent of a fat analog synthesizer.
The voice controller class allows for the direct manipulation of the Jsyn voices. It starts a Jsyn synthesizer which connects the stereo output ports of the voice to a line out. Methods for starting and stopping notes are available publicly and is called from the MIDI interpreter. An update note method allows for aspects of the voice to be changed without triggering another envelope. The voice controller is used for manipulation of the low-pass filter’s frequency in the SuperSaw voice. In future iterations of this project, the voice controller will allow the MIDI interpreter to alter more voices.
Several JMSL music shapes are created in the composition controller then launched via the JMSL scheduler. The music shapes are altered via public methods that receive input data from the MIDI interpreter then generate or add to the music shapes. Each unit voice has its own music shape which also has a distinct method for starting and updating the music shapes. In addition, each music shape is setup with a different number of repeats and level of polyphony based on the artistic qualities of the voice.
This Java class implements the MidiListener class from JMSL. The MIDI Interpreter is started from the main class of the application and initiates a listener to watch for incoming MIDI events using a JMSL MidiParser class. Each infrared distance sensor and button has been assigned a permanent MIDI note value. When a “note ON”, “note OFF”, or a polyphonic aftertouch message is transmitted from the hardware, the MIDI interpreter will act on those messages based on the MIDI note value. Polyphonic aftertouch was chosen because, unlike most messages sent via MIDI, it contains the note value along with the same message [@midi1996complete pp. 4-7]. This allows the MIDI interpreter to identify which sensor is sending the aftertouch message. Adding aftertouch gives each sensor two dimensions of input to alter voices or the composition: a note may be triggered then aspects of the sound of the note can be altered based on the distance of the hand from the sensor.
The right button on the controller triggers a mode in which the RadioStatic voice’s envelope is started, then looped. The composition controller contains a melody generation method that chooses long durations between nine and fifteen seconds, MIDI pitches between seventy seven and eighty three, and a hold duration that is one point four times the chosen duration. These dimensions are added to the music shape via a for-loop that runs five times.
While in radio static mode, the left infrared distance sensor creates and launches a music shape that controls the RedShift voice. The aftertouch pressure values are sent to the composition controller to add to the music shape. The right infrared distance sensor starts and adds to the StarTwinkle music shape. The pressure values also affect the pitches.
When the right button is pressed again, the right infrared distance sensor performs the same function as before, but at four times the amplitude as before. The left sensor then controls the SuperSaw voice via the voice controller: a “note ON” triggers the envelope loop, the pressure affects the low-pass frequency, and a “note OFF” releases the voice and completes the envelope. In addition, the pressure values from the right infrared distance sensor also change the pitches of the SuperSaw voice sending the pressure values at an octave lower. This allows the SuperSaw drone to act as a pitch center for the StarTwinkle melody while allowing changes in the center pitch on a whim.
Holding down the left button creates a SuperSaw music shape with notes that last a quarter of a second. While this button is held, the pressure values alter the pitches in the music shape while a random amplitude value between point five and one is chosen.
The resulting hardware and software combination allowed for the creation of a piece that communicated a radio wave’s journey to the center of the universe. This idea initially came about when toying with the RadioStatic voice: it sounded like a radio signal that was being obfuscated by random bits of noise. Upon the realization that this was going to be the main idea of the piece, the rest of the voices were created to make a soundscape communicating this idea. The SuperSaw voice was designed to invoke the vastness of space, while the StarTwinkle voice was created to convey a sense of wonder. Mixing in the RedShift voice created a mysterious chaotic sound.
Initially, there was a concern about the music shapes having linear and chromatic melodies. However, moving the hand rapidly in random vertical movements created some interesting lines. During testing of the piece, a bug was discovered that caused the SuperSaw voice to break out of the envelope and create rapid sharp attacks when hovering the hand around the “note ON” threshold. This was utilized as another expression in the piece to create a bit of tension.
Overall, using infrared distance sensors to control the voices and composition allowed for a unique control scheme. In fact, during the performance of the piece for Algorithmic Composition class, one audience member described the use of this type of control as seeming like performing magic. It will be fun to experiment more with this piece in the future as there are many more dimensions to explore using the infrared distance sensors.
Experimenting with algorithmic composition using a non-traditional input device created a rewarding performance that warrants further exploration of the platform. The desire to create more compositions and to use more infrared distance sensors in unique orientations will drive this exploration further. However, it was disappointing that a more portable platform could not be made in time for the performance. Perhaps, with further research, a computer that is a similar size to the Raspberry Pi but has stronger processing power can be found and used in the same manner as a laptop. However, despite Java being able to run on a variety of operating systems, it appears that Java’s is only supporting 64 bit, x86 processors in the latest version of the Java Development Kit. Since ARM support has dried up, it may be wise to choose a mini computer with this processor platform instead of the Raspberry Pi. However, despite the performance issue, Java was flexible in that development of the software was done on a Windows machine then tested on the Raspberry Pi. Java’s ability to run anywhere allowed the last-minute change to using the MIDI controller with a Windows laptop. In addition to portablility, Java has excellent integrated development environments. Eclipse and Netbeans were used during the creation of the composition and were easy to use due to their helpful documentation and excellent auto-completion tools.