this package can simulate the environment with UWB by using Gazebo. It provides the python srcipts to add noise to the Gazebo and compute the global pose(uwb_pose) of turtlebot3(waffle) without orientation. With the help of package "robot localization", the amcl_pose and uwb_pose can be fused to provide a more robust pose estimation.
The repositories with packages (turtlebot3, turtlebot3_msgs, turtlebot3_simulations, robot_localization) need to be cloned into your catkin_ws. Note: please choose the level cjj_turtlebot3, cjj_turtlebot3_simulations. These two packages are the new added branchs for the origin master.
This package is to simulate the UWB range measurements in ROS environment. Generated data published to “uwb_data_topic”

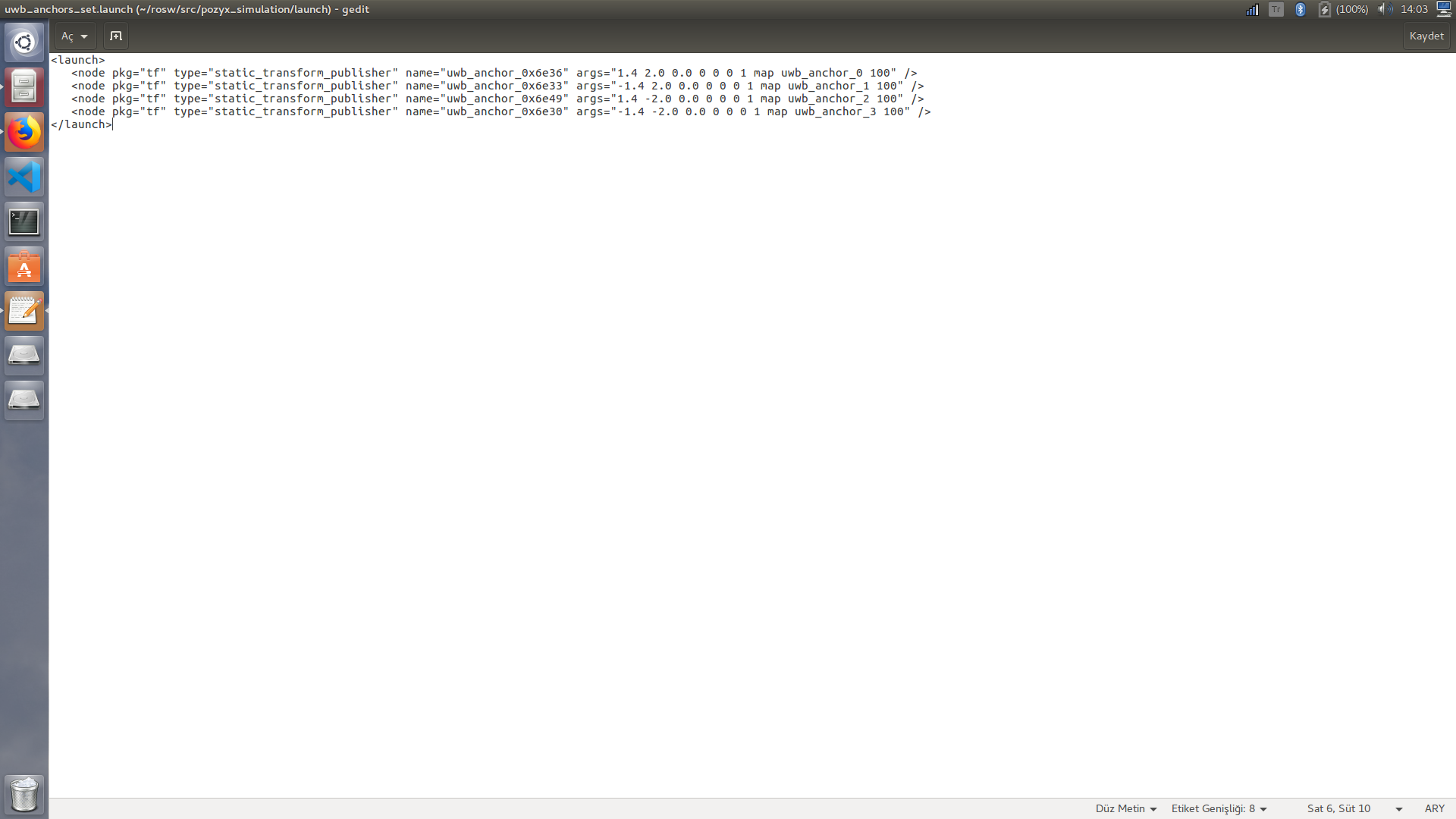
The file that contains the UWB anchor information is in "launch/uwb_anchors_set.launch" file. It is possible to add or remove the UWB anchors as you like.
Note : uwb tag frame name should be as follows uwb_anchor_0, uwb_anchor_1, uwb_anchor_2 ...
Location of the tag has been taken from the robot position so to use this information "modelstate_index" parameter (for turtlebot3 modelstate_index =2) which is in "launch/uwb_simulation_initializing.launch" file must set correctly depending on the robot model used. It is possible to find your own robot parameter in "gazebo/model_states" topic.
Use the command below in terminal to start it with default settings
roslaunch pozyx_simulation uwb_simulation_initializing.launch
Name of the publisher topic is "uwb_data_topic". You can check it by using the command below in terminal
rostopic echo /uwb_data_topic
Message type consists of 3 different arrays
1. anchors name => int64[] destination_id
2. anchors distance to robot => float64[] distance
3. time stamp => time[] stamp
If you want to start manually with custom maps. You can change map and map configuration in maps folder and start manually with the codes below.
rosrun map_server map_server map.yaml rosrun rviz rviz rosrun pozyx_simulation uwb_simulation.py Note: in launch file, the node for rviz in the uwb_simulation_initializing.launch has been annotated.
Noise has been added to the every UWB ranging data
np.random.normal(0, uwb_dist*0.015,1)
please type the command "roslaunch turtlebot3_gazebo uwb_waffle.launch", it will run the Gazebo and load the turtlebot3_world.world. You can also choose the specific world. It includes the launch file "uwb_simulation_initializing.launch" to simulate the uwb environment.
please type the command "rosrun pozyx_simulation add_noise_Gazebo_odometry.py". Gazebo provides a perfect world without noise for the odom_frame. Therefore, it's necessary to add nosie manually to simulate the real world.
please type "rosrun pozyx_simulation sqrrange_leastsqr_localization.py". This python script can subscribe the topic "uwb_data_topic" to get the distances between waffle and uwb anchors. And it can compute the pose of waffle and publish the pose to the topic "uwb_pose". The covariance of uwb_pose has been set as static. You can also modify as dynamic covariance.
please type "export TURTLEBOT3_MODEL=waffle" and "roslaunch turtlebot3_navigation waffle_uwb_amcl_localization.launch". This launch file aims at fusing the two global poses (uwb_pose and amcl_pose). The "amcl_waffle.launch" has been added to the launch folder of package "turtlebot3_navigation". The parameter "tf_broadcast" has been set as false.
Note: "fusion.launch" uses "ekf_localization_node" in package "robot_localization" and the yaml.file "ekf_amcl_uwb.yaml" exists in the folder "param" of the package "pozyx_simulation". In this yaml.file, /odom, /amcl_pose and /uwb_pose are added. You can also add imu into this file. The "process_noise_covariance" and "initial_estimate_covariance" can be modified.