I was challanged with task of fisheye distortion correction. The photos needed to be undistorted had no patterns like checkerboard, so I could not just calibrate the lens and pass the calibration matrix to OpenCV method. Regarding that, I came up with an idea of using pincussion distortion to fisheye distorted photos. As far as fisheye distortion can be simplified to barrel distortion (normally it consists of radial and tangential distortion, but here we omit the second one) we could just use reverse barrel distortion, which is a pincussion one.
The pipeline can be discribed as follows:
- The original picture is passed.
- Two remaping index matrix are created, for y and x axis respectivly. Their size is equall to the original image size, or may be bigger in case when paddings are used. Paddings are needed if the full picture is required. By default (with 0 padding), the resulting image is cropped due to the "streching of image" with pincussion distortion.
- Every value of remapping matrix (lets think of it as tensor containing coordinates of x and y) is normalized, so that middle point becomes (0,0). It will be trated as principal point of the lens.
- Each normalized index is transformed to polar coordinates and passed (in a vectorized manner for speeding up the process) to distortion (or redistortion if you will) function, changing to a new pair of index which represents the position of pixel on original image with index equal to the value of remapping matrix cell that is to be moved to the this position on remap matrix. This may be tricky at first glance, so take some time to understand how
cv2.remap()works, hope this helps. - The obtained matrix (something like a blueprint for the transformed image construction) is then renormalized with respect to size of original image and the padding, if used, and passed to
cv2.remap()gaining the final transformed image.
Remaping matrix calculation takes some time, but regarding that it is the same for all the pictures taken with the same lens (it is independant from the content of image) it needs to be calculated only once.
The are plenty of models here and there, but here are the ones I tried for now:
- Logarithmic model [1]
- Field of view model [1][2]
- Fitgibbon model (simplified radial) [3]
- Radial model [1][2]
- Division model [1][2]
- Sterad model [4]
Every model has some distortion paramethers in different forms. For now I don't have a method to find the "correct" values for them computationally, so all of them where just approximated by hand (lets say it was grid search :) ). Feel free to play with them by yourself, maybe you'll get better results
In fututre maybe I will implement some kind of distortion paramether "calibration", but that is not for shure. Every paramether depends on each individual lens and picture taken with it, so is to some extent unique in each case.
Here I will dive into practical details about models, so that it would be easier for you to use them. All of them use polar coordinate system because in this case it is much more handfull and demands less code.
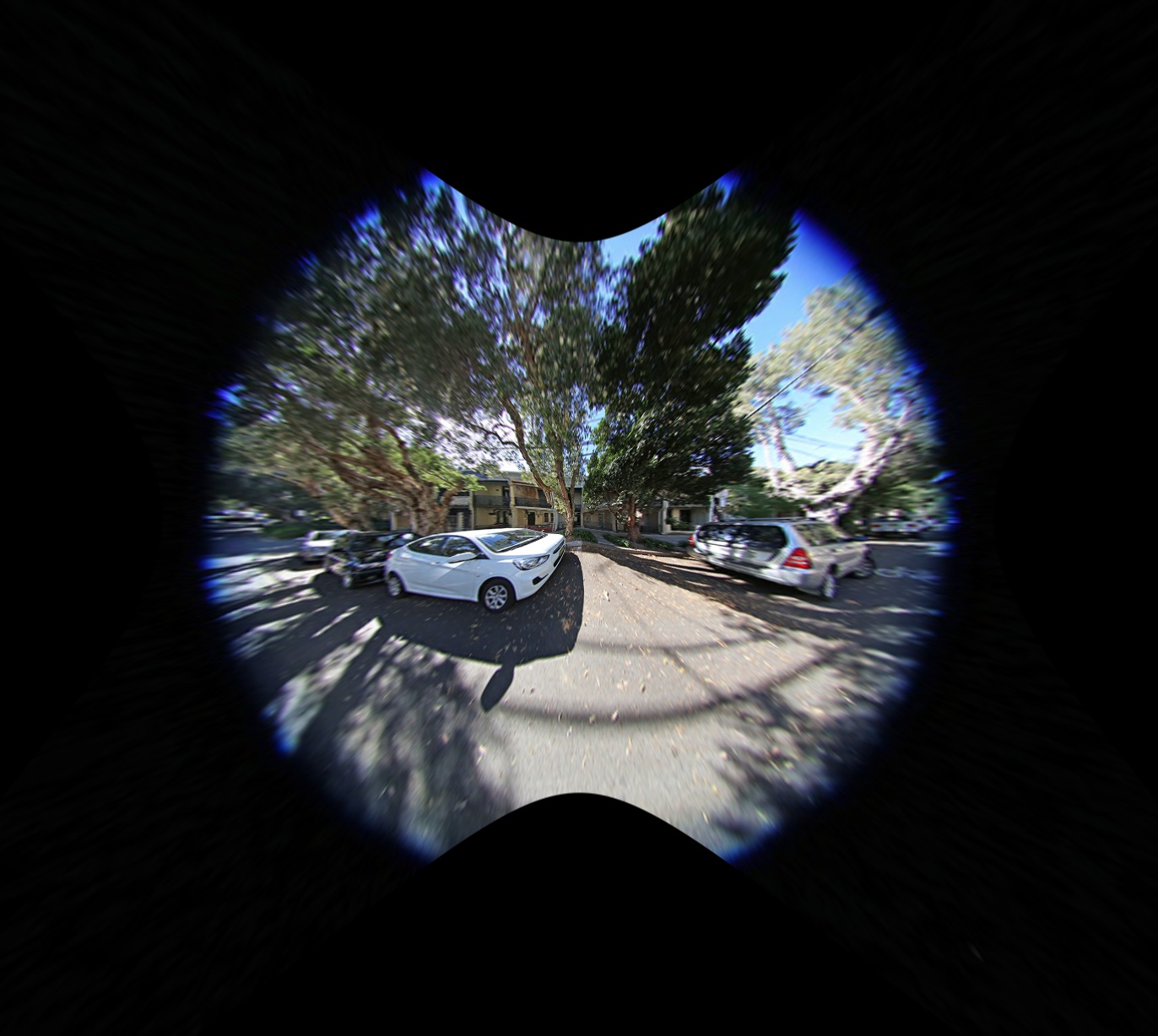
Here is the original image took from here:

The math behind the model can be found in corresponding paper [1]. It had two paramethers: s, or scaling factor, and lambda that controlls the amount of distortion. The distortion changes the next way due to the change of this paramethers: the bigger the s is the less there are pincussion distortion and the smaller the lambda is the closer is the resulting image. So, I guess I somehow confused this to paramethers because s behaves exactly like the scalling paramether and visa versa. The results prooved to be not the ones I was expecting, maybe I made some mistake in implementing the model, so if you find one, I would be grateful if you report me.


This one can bo found in [12]. I use the reverce function to obtain pincussion distortion in place of barrel one. The only paramether it takes is and angle in radians. The model showed the best results so far and it is said [2] that it can be combined with radial model (didn't try it out yet).

This is the simplest one, so it was the first to be implemented. Results are better than nothing but still not as good as FOV model. Further information about the model is found here [3].

Steradian model is actually a quite creative idea that came to mind of this person. I didn't find this approach in any of papers, so you can get the code form the original repository. Results are quite unusual, but may come in handy in certain situation.