Stereo vision is the computer vision branch that allows the discovery of dimensions, shapes and positions of objects based on a pair of images.
In this project we develop and explore stereo vision algorithms for:
- extracting depth maps using camera calibration parameters, both in parallel and convergent cameras;
- extracting objects measures in the 3D world.
- python > 3.6
- OpenCV > 3
- numpy
- sklearn
- matplotlib
All available on requirements.txt file:
pip install -r requirements.txtPlace the dataset image folders in data/Middlebury/, according to middlebury's 2014 stereo dataset standards and run the following:
python src/stereo_disparity.pyThe program will run individually for each folder found in data/Middlebury/.
Example output with 2 folders inside:
Processing folder /home/user/proj/computer-vision-project-1/data/Middlebury/Playtable-perfect/
Computing disparity...
Applying filter...
File disparidade.pgm saved on current folder
Comparing to ground truth
bad 2.0 for image pair /home/user/proj/computer-vision-project-1/data/Middlebury/Playtable-perfect/: 0.45
Computing depth map
depth map saved at /home/user/proj/computer-vision-project-1/data/Middlebury/Playtable-perfect/profundidade.png
Processing folder /home/user/proj/computer-vision-project-1/data/Middlebury/Jadeplant-perfect/
Computing disparity...
Applying filter...
File disparidade.pgm saved on current folder
Comparing to ground truth
bad 2.0 for image pair /home/user/proj/computer-vision-project-1/data/Middlebury/Jadeplant-perfect/: 0.61
Computing depth map
depth map saved at /home/user/proj/computer-vision-project-1/data/Middlebury/Jadeplant-perfect/profundidade.png2 files will be generated in each folder:
- disparidade.pgm: The disparity map saved in pixels
- profundidade.png: The depth map computed from the disparity map, with a colormap representing the distance in mm
stereomatching and filtering parameters are set dinamically, based on distance offset and focal length.
-
Disparity map:

-
Depth map:

Place the Morpheus image pair from Yasutaka Furukawa and Jean Ponce dataset in data/FurukawaPonce/, along with the cameras calibration parameters and run:
python src/converged_stereo_disparity.pyThis will repeat the steps in last section, but since these images created from converged cameras, we'll have to preprocess the images before stereo matching.
example output:
original images dims: ((1300, 1400, 3), (1200, 1200, 3))
images dims after reshape: ((1300, 1400, 3), (1300, 1400, 3))
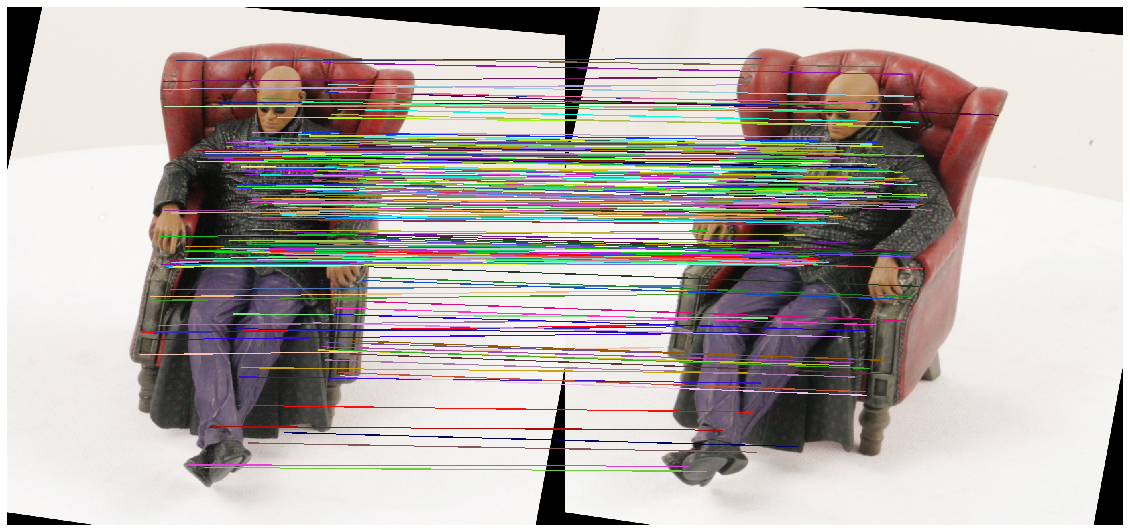
Finding keypoints...
Finding homography...
Warping perspective...
Computing disparity...
Applying filter...
File disparidade.pgm saved on current folder
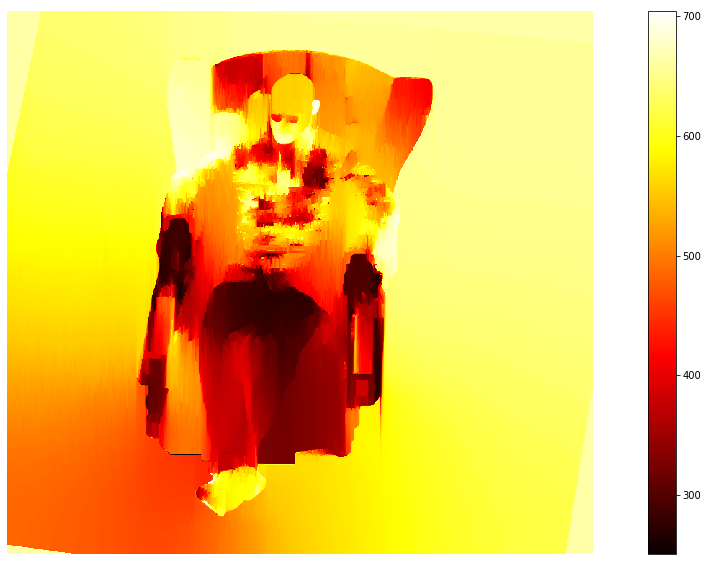
depth map saved at /home/user/proj/computer-vision-project-1/data/FurukawaPonce/profundidade.png2 files will be generated in the same folder:
- disparidade.pgm: The disparity map saved in pixels
- profundidade.png: The depth map computed from the disparity map, with a colormap representing the distance in mm
- Point matching after rectification:
- Depth map:
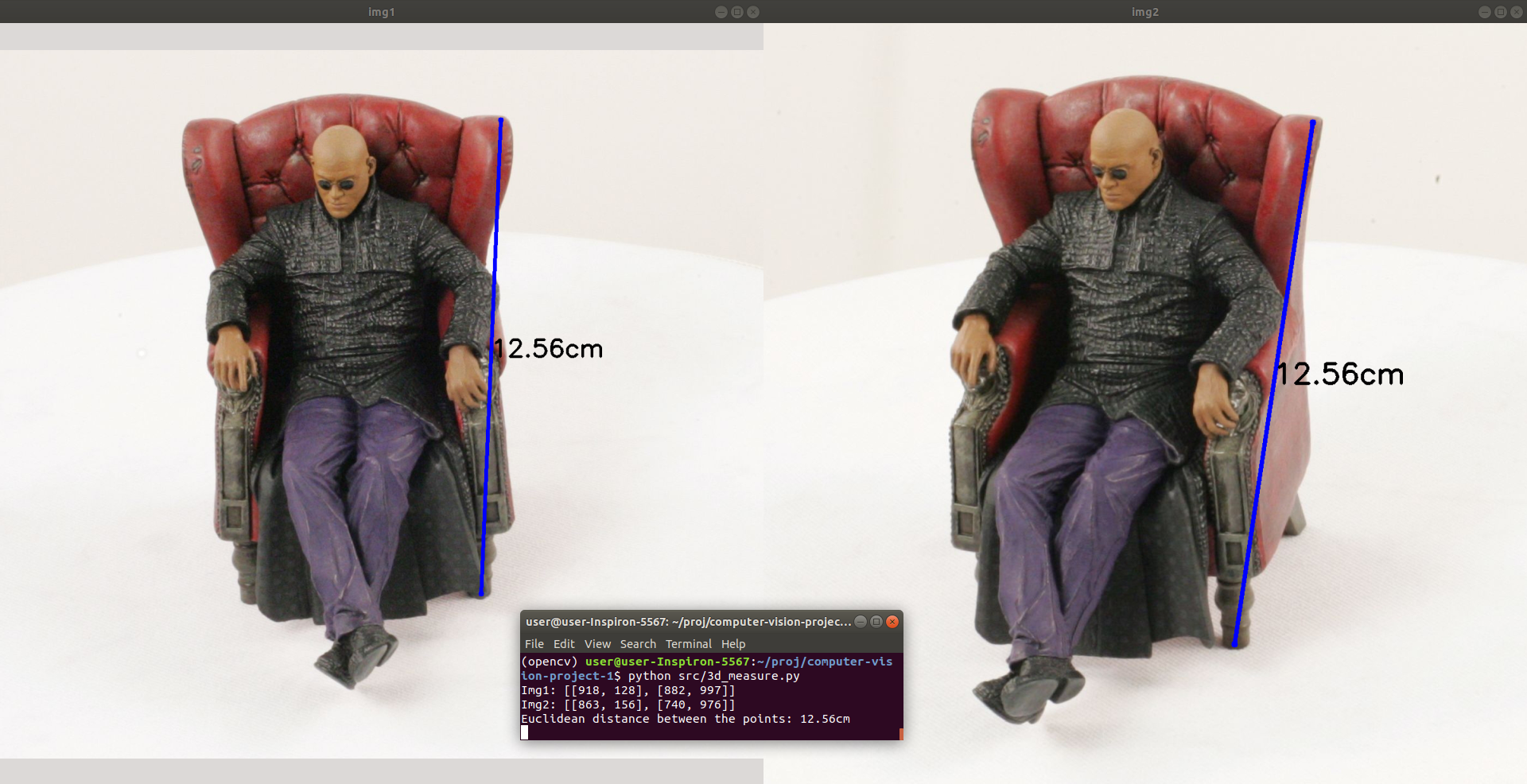
Place the Morpheus image pair from Yasutaka Furukawa and Jean Ponce dataset in data/FurukawaPonce/, along with the cameras calibration parameters and run:
python src/3d_measure.py2 windows will open, the left image (img1) one and the right image (img2).
Double click 2 points on the left image, a line will form between them. Then select the same 2 points on the right image. A new line will show on the right image, and then the line measure will appear in cm.
Repeat the process for having a good idea about the object size.