The ROS packages for CeleX™ CeleX5-MIPI Dynamic Vision Sensor.
This repository provides several functional packages and examples of CeleX5-MIPI Event-based Camera under ROS, including:
celex5_ros: provides a more perfect driver under ROS of CeleX5-MIPI Event-based Camera.celex5_msgs: ROS message types for CeleX5-MIPI.celex5_calibration: provides tools and tutorials related to the calibration of CeleX5-MIPI, based on events data.
The code in this repository mainly follows the Google C++ Style.

CeleX™ is a family of smart image sensor specially designed for machine vision. Each pixel in CeleX™ sensor can individually monitor the relative change in light intensity and report an event if it reaches a certain threshold. Asynchronous row and column arbitration circuits process the pixel requests and make sure only one request is granted at a time in fairly manner when they received multiple simultaneous requests. The output of the sensor is not a frame, but a stream of asynchronous digital events. The speed of the sensor is not limited by any traditional concept such as exposure time and frame rate. It can detect fast motion which is traditionally captured by expensive, high speed cameras running at thousands of frames per second, but with drastic reduced amount of data.
CeleX-5 is a multifunctional smart image sensor with 1Mega-pixels(1280*800) and some additional features integrating on-chip (such as on-chip optical-flow). The sensor supports several different output formats: pure binary address-events, address-events with either pixel intensity information or timing information. In addition, the readout scheme of the sensor could either be asynchronous data stream or synchronous full frames. Different combinations of the output format and readout scheme lead to great flexibility of this sensor, which supports 6 separate operation modes in total (but one of them doesn't provide corresponding interface in SDK). To further meet the requirements of different applications, the sensor could also be configured into a loop-mode, in which it could automatically switch among three separate modes.
ROS is a very popular experimental platform, which provides rich development interfaces and resources. But in the official open source repository of CeleX ™, the examples under ROS are very incomplete:
- The official SDK version has been updated to v2.0, however the version supported by its ROS-Sample remains at v1.6.
- The official ROS-Sample is just a simple example. It only outputs an image in a working mode. It does not provide a comprehensive and convenient parameter configuration function and interface.
Therefore, in order to make more convenient use of the resources provided by ROS, I developed the content in this repository.
This repository provides several functional packages and examples of CeleX5-MIPI Event-based Camera under ROS, including:
-
celex5_ros: A more perfect driver under ROS of CeleX5-MIPI Event-based Camera. You can freely configure and output multiple channels of data (raw event data, IMU data, grayscale frames, optical flow information, etc.) according to your needs, and provide therqt_reconfigurepanel to support dynamic parameter configuration. More details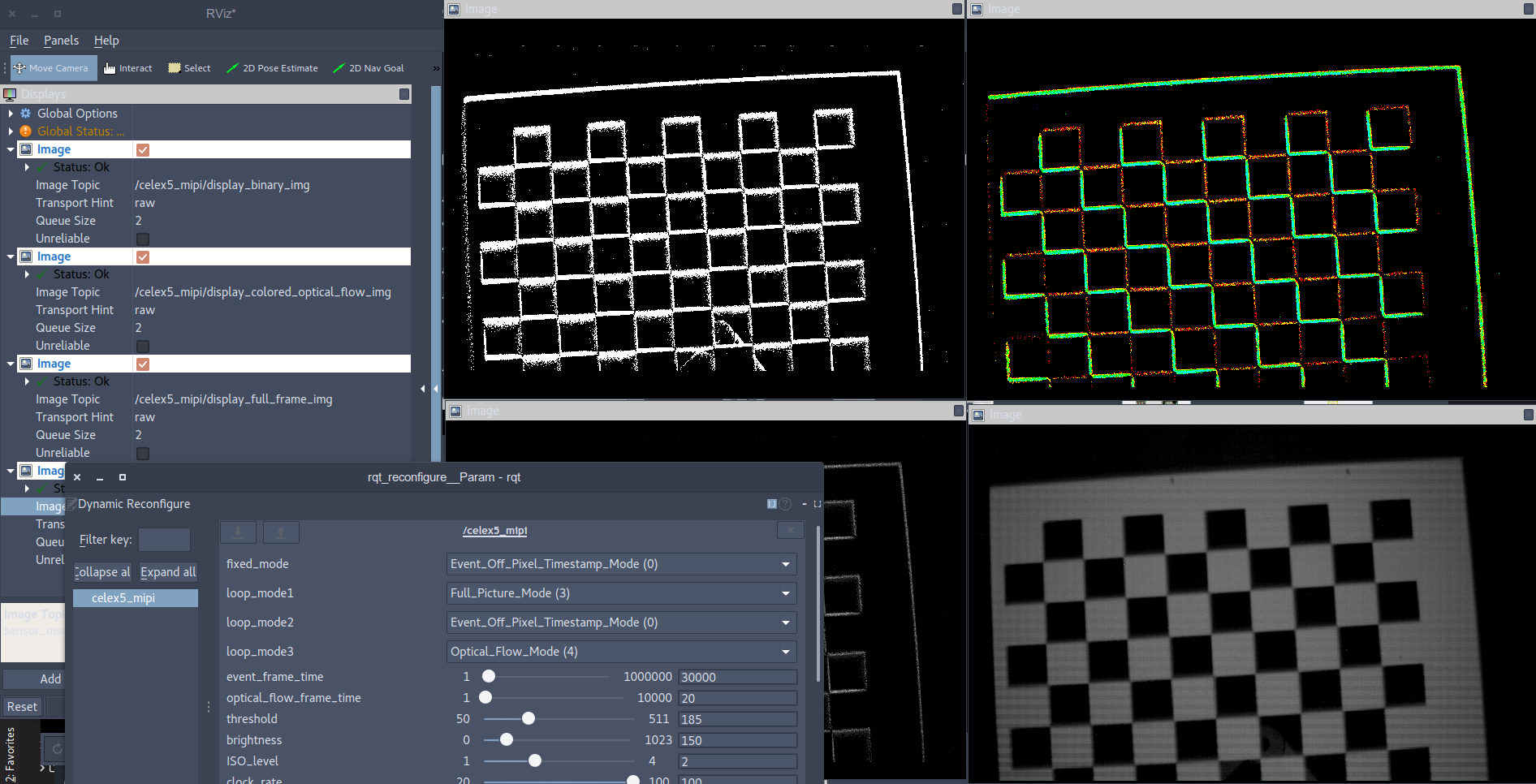
Currently only tested on CeleX5-MIPI products. Other series of CeleX5 are not tested because I have no such equipments.
-
celex5_msgs: ROS message types for CeleX5-MIPI. -
celex5_calibration: provides tools and tutorials related to the calibration of CeleX5-MIPI, based on events data. Including calibration board generation (currently only support the blinking checkerboard, other types to be added), intrinsics calibration, extrinsics calibration with another traditional frame camera (using Kalibr), synchronous collection and publishing of image data required for calibration, time stamp alignment with traditional camera (TODO, existing problems) and other tools. More details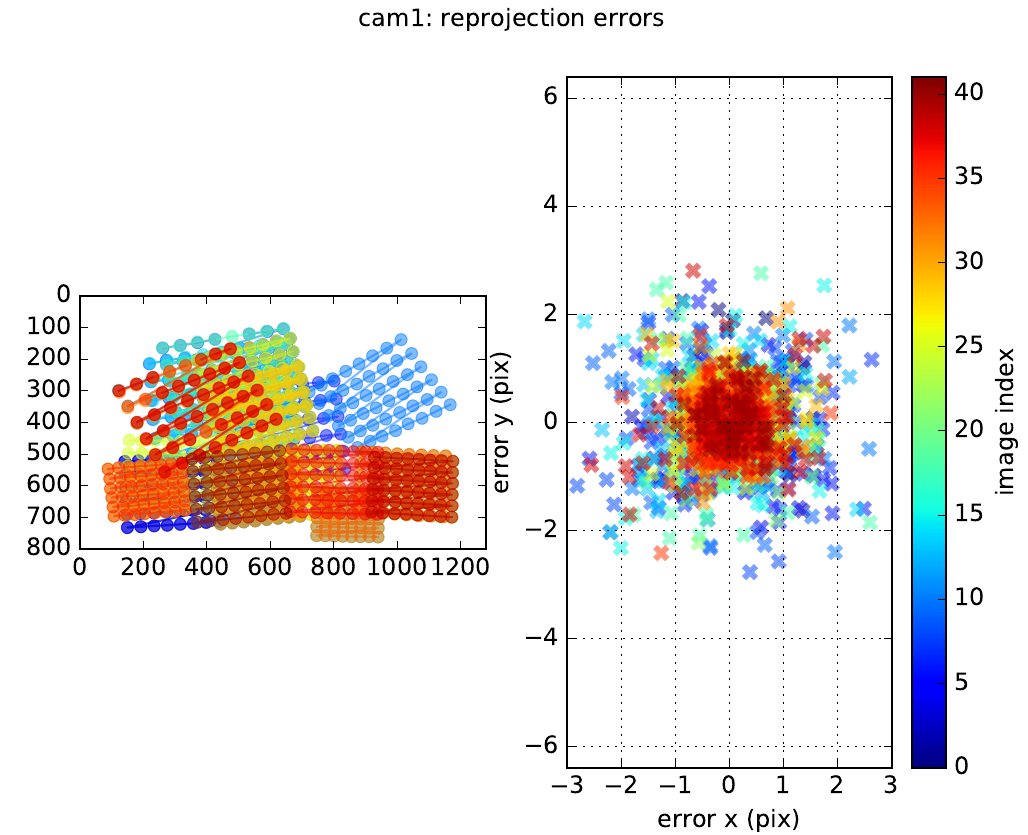


It is recommended that you read the concept section of the CeleX_SDK_Getting_Started_Guide and CeleX5_SDK_Reference documentation provided by CeleX carefully before using it, and have a general understanding of basic terminology.
-
Build
mkdir -p ~/celex_ws/src cd ~/celex_ws/src git clone git@github.com:kehanXue/CeleX5-ROS.git git submodule update --init --recursive # Or with http: `git clone https://github.com/kehanXue/CeleX5-ROS.git` cd .. rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO catkin_make # Or use `catkin build`
If the building process reports the errors of which dependent libraries are missing, install them.
-
Create the udev rules to solve the permission denied problem when read/write from a usb device:
cd ~/celex_ws/src/CeleX5-ROS/celex5_ros/scripts chmod +x ./create_udev_rules.sh ./create_udev_rules.sh
-
Run
celex5_ros. More detailsFirst plug the sensor into your computer.
source ~/celex_ws/devel/setup.bash # Or source setup.zsh when you use zsh roslaunch celex5_ros celex5_ros_node.launch # In a new Terminal rosrun rqt_reconfigure rqt_reconfigure # Open rqt_reconfigure to config
If the program runs without error, you have run successfully. Use
rostopic listto see published topics, and userivzorimage_viewto subscribe to corresponding image topics to see published images. Whether to publish data to an image topic is determined by both the whether display parameter configuration and the sensor current working mode.$ rostopic list /celex5_mipi/display/accumulated_img/camera_info /celex5_mipi/display/accumulated_img/raw_image /celex5_mipi/display/binary_img/camera_info /celex5_mipi/display/binary_img/raw_image /celex5_mipi/display/count_img/camera_info /celex5_mipi/display/count_img/raw_image /celex5_mipi/display/denoised_binary_img/camera_info /celex5_mipi/display/denoised_binary_img/raw_image /celex5_mipi/display/full_frame_img/camera_info /celex5_mipi/display/full_frame_img/raw_image /celex5_mipi/display/gray_img/camera_info /celex5_mipi/display/gray_img/raw_image /celex5_mipi/display/in_pixel_img/camera_info /celex5_mipi/display/in_pixel_img/raw_image /celex5_mipi/display/optical_flow_direction_img/camera_info /celex5_mipi/display/optical_flow_direction_img/raw_image /celex5_mipi/display/optical_flow_img/camera_info /celex5_mipi/display/optical_flow_img/raw_image /celex5_mipi/display/optical_flow_speed_img/camera_info /celex5_mipi/display/optical_flow_speed_img/raw_image /celex5_mipi/display/parameter_descriptions /celex5_mipi/display/parameter_updates /celex5_mipi/display/superimposed_img/camera_info /celex5_mipi/display/superimposed_img/raw_image /celex5_mipi/events /celex5_mipi/imu_data /celex5_mipi/polarity_img/camera_info /celex5_mipi/polarity_img/raw_image /celex5_mipi/sensor/parameter_descriptions /celex5_mipi/sensor/parameter_updates /rosout /rosout_agg
Topic of raw events data:
/celex5_mipi/eventsTopic of imu data:
/celex5_mipi/imu_data. Note that the ROS message type of imu topic is different from the standard IMU message type (sensor_msgs/Imu) in ROS due to the way of obtaining the raw imu data of CeleX5.View an image via
image_view:rosrun image_view image_view image:=/celex5_mipi/display/binary_img/raw_image
-
Run
celex5_calibration. More detailsA series of methods and tools for camera parameter calibration based on events data are provided.
-
Pattern generator (blinking chessboard). More details
Run:
rosrun celex5_ros pattern_generator_node # In a new Terminal rosrun rqt_reconfigure rqt_reconfigure # Open rqt_reconfigure to config
-
Intrinsics calibration based on camera_calibration toolkit in ROS. (if you want to calibrate the external parameters of other cameras, this tool in ROS only supports the same resolution...)
Install:
sudo apt install ros-$ROS_DISTRO-camera-calibrationThe detailed tutorials: link
-
Based on Kalibr toolkit, which supports both intrinsics calibration and extrinsics calibration with another (traditional or event-based) cameras, in different resolutions. Event data based method.
The detailed tutorials: link
Also provides a series of tools to collect calibration data of CeleX5-MIPI Camera.
-
Time stamp calibration with another camera.
TODO, existing problems. link
-
celex5_ros
- The implementation of the Nodelet interface still has problems (the ros node version has no problem). During the process of loading the camera's parameter file through the nodelet, parsed xml files will be garbled. I haven't found the problem for a long time. If you provide suggestions, I will be very grateful.
- Regarding the
Multi_Read_Optical_Flow_Modemode in the document, no relevant interface was found in the SDK. - The function of generating FPN has not been added yet, please still use the official GUI Demo provided by CeleX™ to generate FPN (The GUI Demo running under Linux may report
Segmentation fault (core dumped)errors directly. It is more stable under Windows). - The function of recording bin files use CeleX™ SDK is not provided for now, but under ROS we can use ROS bag for recording.
celex5_calibration
- The time stamp calibration with another camera.
-
Why the sensor is connected and the program run looks well, but I can't get the data from the sensor?
Please check the permission of the usb device. In Build and Run section 2, you can create the udev rules for CeleX sensor to solve the permission problem.
You can export a Linux environment variable to get the debug information of
libusb:export LIBUSB_DEBUG=1then in the same terminal, launch the celex_ros:
roslaunch celex5_ros celex5_ros_node.launch
you may see some error from
libusboutput. Such as:libusb: error [_get_usbfs_fd] libusb couldn't open USB device /dev/bus/usb/****: Permission denied libusb: error [_get_usbfs_fd] libusb requires write access to USB device nodes.The you can use the scripts in
celex_ros/scriptsto create the udev rules to solve the permission problem.