
This is the code for PanoTree: Automated Photospot Explorer in Virtual Reality Scenes
- Windows 11 23H2 or later (also works on WSL2), Ubuntu 20.04 or later, macOS 14.5 or later
- python 3.10.13
- Unity 2021.3.2f1
- Install Unity 2021.3.2f1 with Windows Build Support
- Install Python 3.10.13
- Install the required packages using poetry
poetry installBefore exploring the photospots, you need to prepare the VR scenes by following procedure:
- Open the Unity project inside
unityproject/. - Open the
Assets/ClusterLab/Scenes/Mainscene.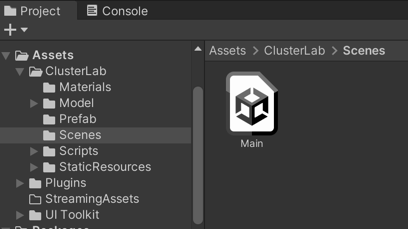
- Place the game objects under the "World" object.

- Create Collider objects to define exploration space.
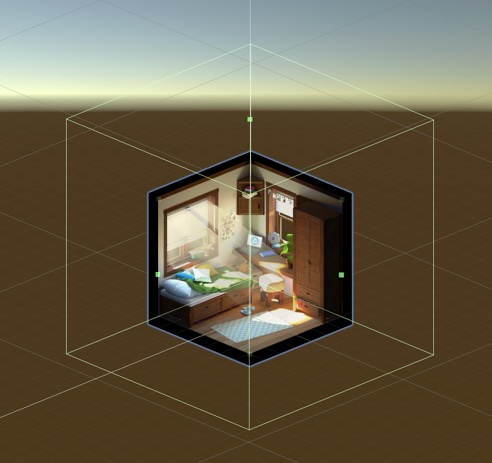
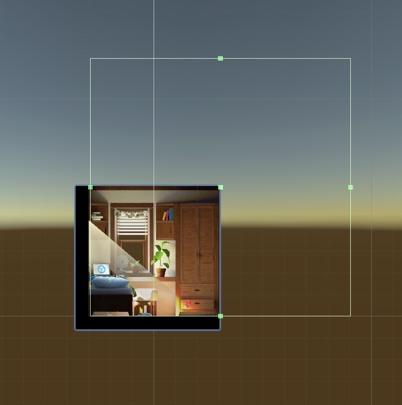
Note that the collider objects defines the space that the camera can move. If the space too small, the camera may not be able to capture any meaningful images.




Note that the example scene is just for demonstration purposes.
This algorithm meant to be applied to more complex and larger scenes.
After preparing the environment, you can explore the photospots in the VR scenes by following procedure:
- Prepare the scene as described above.
- Start the API server
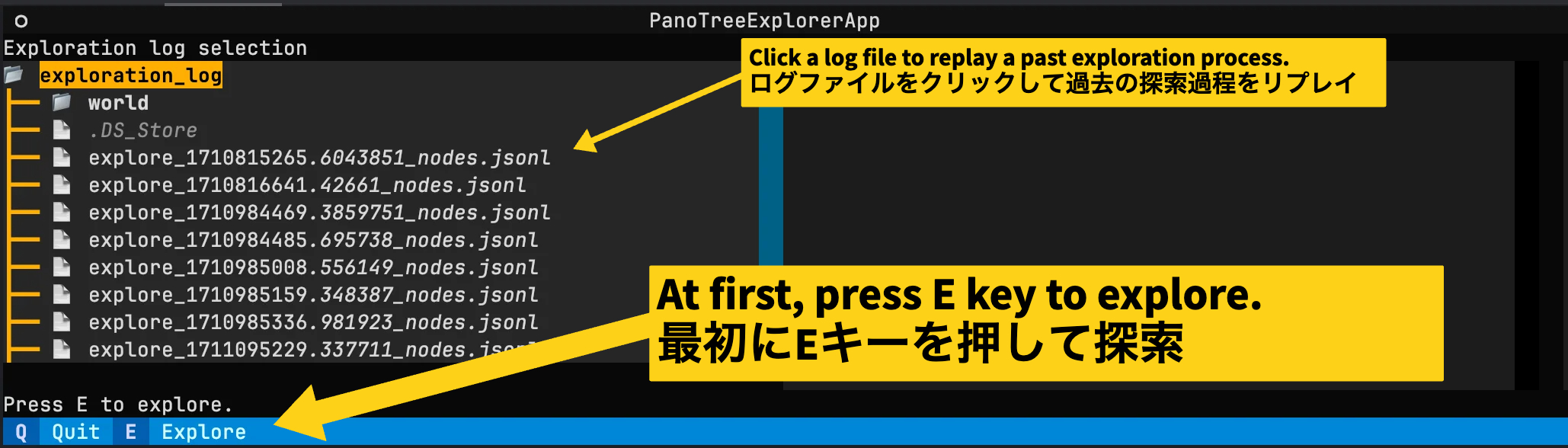
Start the server by clicking thePlaybutton on the Unity Editor. - Start the PanoTree explorer
If you're running panotree_explorer.py on WSL, you need to specify the IP address of the host machine instead of
poetry shell python panotree_explorer.py --device cuda --api_host localhost
localhost. - Press E to explore the photospots.
- Switch to the Unity Editor and open the scene view to see the exploration process.
Note: Keep the game view visible at the same time for the rendering process to work properly.



- The arrows represent the best camera directions in the node.
- The Color of the arrows the score of the node.
- Red: High score
- Green: Intermediate score
- Blue: Low score
- Note that the Arrows in the teaser image are the results of the grid search in the leaf nodes and are not displayed in the actual implementation.
- The Color of the arrows the score of the node.

- Under the "TreeRoot" object, there are "Node" objects that represent the nodes in the exploration tree.
Node Rendererwindow shows the rendering results corresponding the camera directions and the score of the node, including descendants' ones.Show/Hide HOOtoggle button shows/hides the arrows of HOO nodes.Show/Hide Boundtoggle button shows/hides the bounding box of the node.Show/Hide Frustumtoggle button shows/hides the frustum of the camera.
In most cases, it is sufficient to specify only the torch device, for example --device cpu.
usage: panotree_explorer.py [-h] [--num_updates NUM_UPDATES] [--num_local_dir NUM_LOCAL_DIR] [--c C] [--v1 V1] [--rho RHO] [--seed SEED] [--policy_name POLICY_NAME]
[--value_strategy VALUE_STRATEGY] [--log_root LOG_ROOT] [--api_host API_HOST] [--api_port API_PORT] [--lower_size_bound LOWER_SIZE_BOUND]
[--score_threshold SCORE_THRESHOLD] [--model NAME] [--in-chans N] [--input-size N N N N N N N N N] [--num-classes NUM_CLASSES]
[--class-map FILENAME] [--gp POOL] [--log-freq N] [--checkpoint PATH] [--pretrained] [--num-gpu NUM_GPU] [--test-pool] [--no-prefetcher]
[--pin-mem] [--channels-last] [--device DEVICE] [--amp] [--amp-dtype AMP_DTYPE] [--amp-impl AMP_IMPL] [--tf-preprocessing] [--use-ema]
[--fuser FUSER] [--fast-norm] [--model-kwargs [MODEL_KWARGS ...]] [--torchscript | --torchcompile [TORCHCOMPILE] | --aot-autograd]
options:
-h, --help show this help message and exit
--torchscript torch.jit.script the full model (default: False)
--torchcompile [TORCHCOMPILE]
Enable compilation w/ specified backend (default: inductor). (default: None)
--aot-autograd Enable AOT Autograd support. (default: False)
Hierarchical Optimistic Optimization (HOO) Parameters:
--num_updates NUM_UPDATES
maximum number of nodes to be explored (default: 300)
--num_local_dir NUM_LOCAL_DIR
number of camera directions to be sampled each nodes (default: 21)
--c C HOO hyperparameter c(exploration term), must be greater than 0. (default: 0.2)
--v1 V1 HOO hyperparameter v1(regularization term), must be greater than 0. (default: 0.5)
--rho RHO HOO hyperparameter rho(regularization term), must be greater than 0. (default: 0.5)
--seed SEED random seed for HOO (default: 42)
--policy_name POLICY_NAME
policy name (determines strategy to split the space) (default: size)
--value_strategy VALUE_STRATEGY
how to compute value for HOO (max or mean) (default: max)
--log_root LOG_ROOT root directory for logs (default: ./output/exploration_log)
Render API Parameters:
--api_host API_HOST host for render server (default: None)
--api_port API_PORT port for render server (default: 8080)
Leaf Grid Search Parameters:
--lower_size_bound LOWER_SIZE_BOUND
lower size bound in meters, used to prune nodes with small size (default: 2.5)
--score_threshold SCORE_THRESHOLD
lower score threshold (default: 0.3)
Scoring Net Parameters:
--model NAME, -m NAME
model architecture (default: dpn92) (default: vit_base_patch16_224.augreg2_in21k_ft_in1k)
--in-chans N Image input channels (default: None => 3) (default: None)
--input-size N N N N N N N N N
Input all image dimensions (d h w, e.g. --input-size 3 224 224), uses model default if empty (default: None)
--num-classes NUM_CLASSES
Number classes in dataset (default: 2)
--class-map FILENAME path to class to idx mapping file (default: "") (default: )
--gp POOL Global pool type, one of (fast, avg, max, avgmax, avgmaxc). Model default if None. (default: None)
--log-freq N batch logging frequency (default: 10) (default: 10)
--checkpoint PATH path to latest checkpoint (default: none) (default: ../model_best.pth.tar)
--pretrained use pre-trained model (default: False)
--num-gpu NUM_GPU Number of GPUS to use (default: 1)
--test-pool enable test time pool (default: False)
--no-prefetcher disable fast prefetcher (default: False)
--pin-mem Pin CPU memory in DataLoader for more efficient (sometimes) transfer to GPU. (default: False)
--channels-last Use channels_last memory layout (default: False)
--device DEVICE Device (accelerator) to use. (default: cuda)
--amp use NVIDIA Apex AMP or Native AMP for mixed precision training (default: False)
--amp-dtype AMP_DTYPE
lower precision AMP dtype (default: float16) (default: float16)
--amp-impl AMP_IMPL AMP impl to use, "native" or "apex" (default: native) (default: native)
--tf-preprocessing Use Tensorflow preprocessing pipeline (require CPU TF installed (default: False)
--use-ema use ema version of weights if present (default: False)
--fuser FUSER Select jit fuser. One of ('', 'te', 'old', 'nvfuser') (default: )
--fast-norm enable experimental fast-norm (default: False)
--model-kwargs [MODEL_KWARGS ...]If you find our work useful, please consider citing:
@misc{hayase2024panotree,
title={PanoTree: Autonomous Photo-Spot Explorer in Virtual Reality Scenes},
author={Tomohiro Hayase and Braun Sacha and Hikari Yanagawa and Itsuki Orito and Yuichi Hiroi},
year={2024},
eprint={2405.17136},
archivePrefix={arXiv},
primaryClass={cs.CV}
}