PicoBETH
PicoBETH (Raspberry Pico Badminton Electronic Tension Head) 是一個開源的項目,讓喜歡穿線,但只有機械式穿線機(重錘式、手搖式)的業餘穿線師可以自行製作電子拉線機頭,如果你有一些基本的程式能力,這個項目會很容易完成。
重錘式與改裝零件

改裝完成(原型機)

15磅、30磅 預拉10% 展示影片 https://youtu.be/82X5WgdFZp8
正式機

正式機的改進
- 增加螺杆防塵罩
- 螺杆改使用1610規格,增加張力速度
- 更合理的硬體佈局,各零件可單獨拆裝不需全拆
- 使用堆疊方式減少體積,不會擋到置物槽
- 改使用自行設計PCB電路板
原由
一年前因為公司社團的關係,開始打羽毛球,球技不怎麼好卻迷上的穿線,買了一台重錘式穿線機,原本想購買電子拉線機頭,後來想想我可以用我會的知識,在 Raspberry Pico 上使用壓力傳感器、幾個微動開關和按鈕製作了這個項目。
現有主要功能如下:
- 使用磅或公斤的單位進行張力設定
- 預拉(Pre-Strech)功能
- 張緊後的自動微調補磅減磅功能
- 張力歸零
- 張力系數設定
- 張力校正
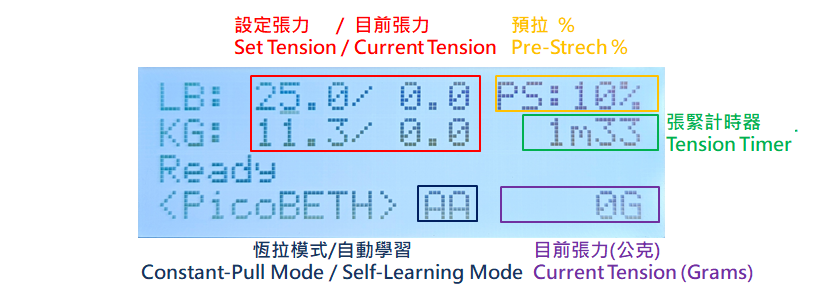
待機畫面
- 使用左右鍵可選擇設定指定調整磅、公斤及預拉的十位數、個位數、小數。
- 使用上下鍵調整選擇的設定。

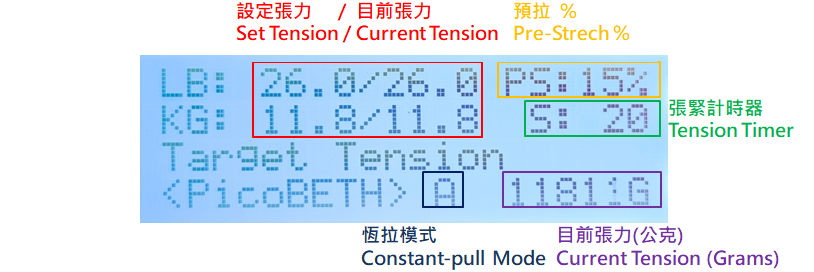
張緊畫面
- 達到設定張力時進入微調程序,磅數不足加磅、過高減磅,直到按下珠夾按鍵或離開鍵結束張緊程序。
- 也可按下上下鍵進入手動微調程序,此時自動微調程序會被取消,按下五向鍵的中鍵後可再次進入自動微調模式。
- 達到指定張力後會開始出現計算秒數。

Warning
微調幅度如太高或太低,可自行調整 FT_ADD 及 FT_SUB 變數
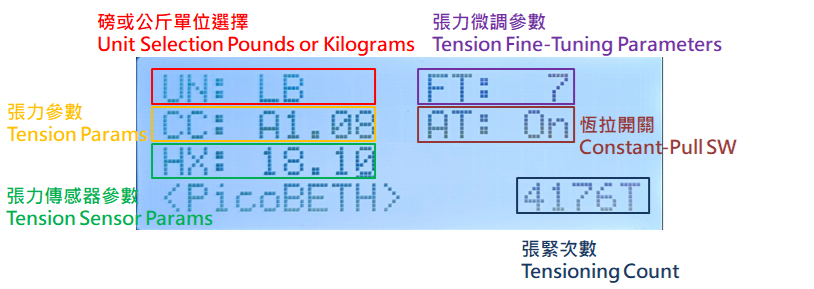
設定畫面
- TS: 待機張力歸 0
- CC: 微調參數(詳見第一次開機章節)
- HX: HX711 的壓力傳感器校正(詳見第一次開機章節)

Note
一般來說設定好後此頁面就不太需要再進來設定了
硬體
主要材料
- Raspberry Pico H
- 1610 200MM 滑台 / 1610 Sliding Table 200MM
- 57步進馬達(2相4線 1.8°) / 57 Stepper Motor (1.8° Step Angle 2 Phase 4 Line)
- TB6600 步進馬達驅動器 / TB6600 Stepper Motor Driver
- NJ5 20KG 壓力傳感器 / NJ5 20KG load cell
- HX711 模塊 / HX711 IC
- 2004 i2c LCD
- WISE 2086 珠夾頭 / WISE 2086 Head
- 5向按鍵模組 / Five-way key
- 按鈕 / Button
- 微控開關 / Micro Switch
- 有源蜂鳴器 / Active buzzer
- 三色 LED / Tri-Color LEDs

接線圖

Warning
請適時增加安全措施,例如增加按鍵的上拉電阻、步進馬達的保險絲、LED 限流電阻之類保護樹梅派 Pico 及馬達電機
PCB 電路板

Note
您可以自行下載上圖洗電路板,避免手焊電路板的麻煩,如果不會洗板的可上露天拍賣搜尋 PicoBETH
Note
此電路板四周的鎖點比照 2004 LCD 鎖點位置,可堆疊減少體積
TB6600 步進馬達電機參數

Warning
如修改此電機參數,程式碼可能會有許多要修正的參數
軟體安裝
使用 Thonny 將以下程式碼檔案儲存到 Raspberry PICO 中,其中 src 資料夾內是 hx711 及 2004 LCD 的相關函式庫
- main.py
- src\hx711.py
- src\lcd_api.py
- src\pico_i2c_lcd.py
Note
感謝 https://github.com/endail/hx711-pico-mpy 提供 hx711 for pico 的函式庫
Note
感謝 https://github.com/T-622/RPI-PICO-I2C-LCD 提供 2004 LCD for pico 的函式庫
第一次開機
校正 HX 參數
HX711 壓力感應器校正系數,第一次使用或有更換壓力傳感器、HX711 電路板時務必重新校正一次
校正方法:
- 將外接式張力計,一端綁在拉線機上,另一端綁上羽毛球線
- 先將 LCD 設定頁面中HX參數設為 20.00
- 跳回主選單設定拉力為 20 磅
- 按上或下鍵開始拉線,當 LCD 顯示 20 磅時,抄下張力計顯示數值
- 至設定頁面上填入剛抄下張力計的數值
Warning
如不做此校正,實際張力會與 LCD 上的張力會有誤差
Important
此參數以設定存檔為主(config.cfg)
參考影片: https://youtu.be/JaplgmXzbjY
設定 CC 參數
當達到指定張力馬達停止時實際張力還會持續變化,另設此需除此係數校正,可手動設設也可自動在設定頁面校正
校正方法:
- 將羽球線固定好,一端綁在拉線機上,另一端在珠夾上
- 至 LCD 設定頁面中 CC 欄位中 AUTO 按鍵上按上或下鍵開始拉線
- AUTO 會自動填入參考的 CC 值
- 使用此值拉線測式,最佳的結果是預拉為 0 時達到指定張力不會進行微調動作 (你也許會在馬達停止時看見 LCD 張力持續變化超過指定張力,這為正常物理現象,最佳的參數在於張力平衡後會線剛好在指定張力不會進行微調的動作)
- 如果自動的CC值不理想,可至設定頁面手動微調CC值後,重覆4的步驟,找到最佳的值
Warning
如果有開預拉,會進行退磅的徵調,所以測試時請將預拉設為 0
Important
更換 HX711 電路板、滑台螺距、馬達的電機會影響此系數,如果覺得在預拉為0時頻繁微調可校正此值
Important
此參數以設定存檔為主(config.cfg)
參考影片: https://youtu.be/KuisR6eKiwk
待機時的張力校正
正常來說待機時顯示器的張力會顯為 0±3G,如不穩定或偏差太大,請檢查是否受到干擾或接錯線;如固定在某個超過 0 太多的數值請重新開機校正,或至設定頁面 TS 欄位點選 RESET 校正
最後
目前功能方面已經滿足我穿線的需求,應不會再增加,但如有好的建議也可以反應給我。