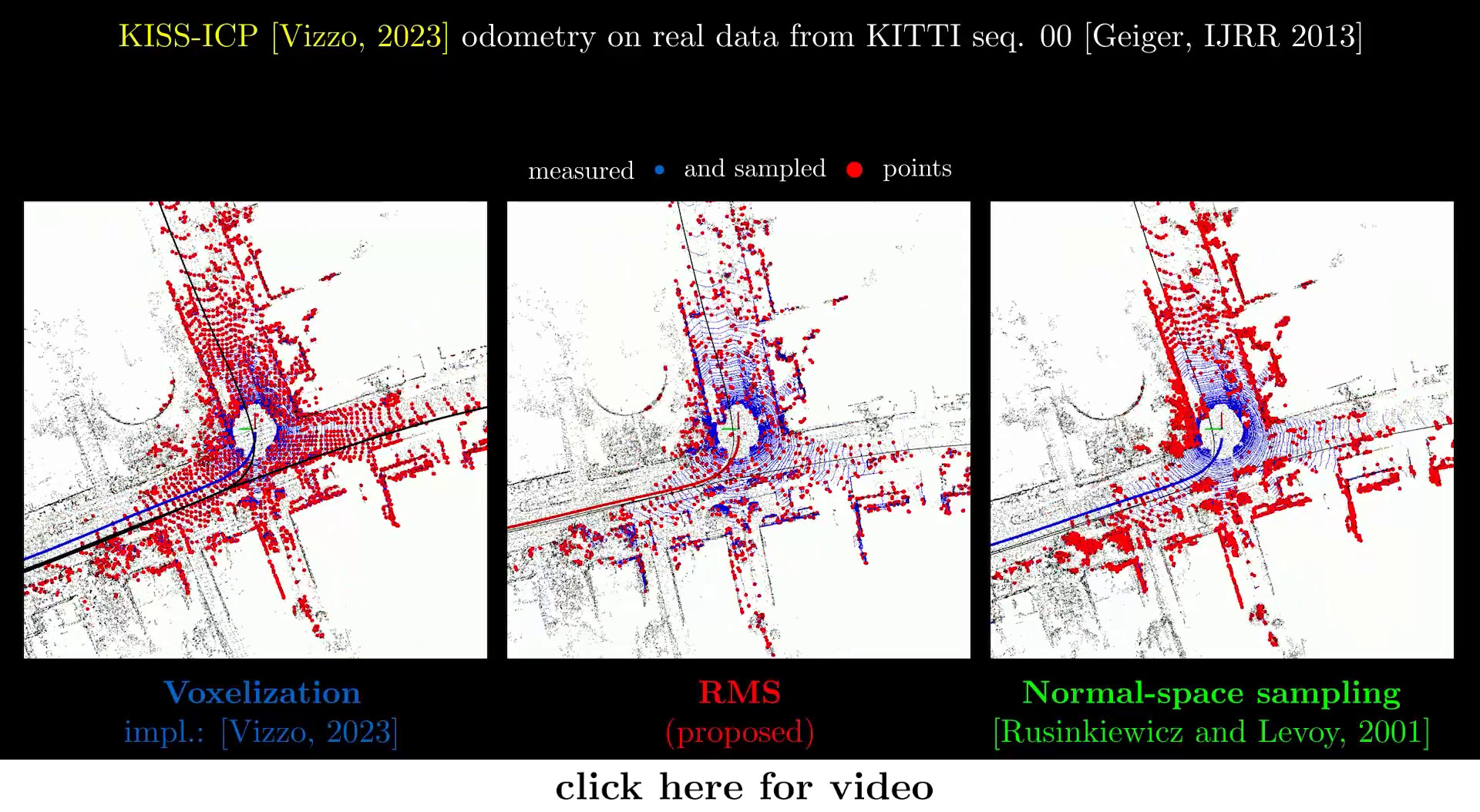
- quick sampling of 3D LiDAR point clouds
- pipelines using RMS are fast (low latency) and accurate
- designed for real-time LiDAR-based 6-DoF odometry/SLAM pipelines
- both point-based (ICP-like) and feature-based (LOAM-like) methods
- single parameter only: lambda
- depends on the SLAM pipeline (and not the environment!)
- tuned just once given your pipeline
- deterministic (no data for learning needed)
- when is it not going to perform well (most probably):
- the data have large orientation changes between two consecutive frames (tens of degrees)
- under heavy noise
Published in IEEE RA-L --- pdf.
- Install prerequisities (
mrs_lib,PCL):
curl https://ctu-mrs.github.io/ppa-stable/add_ppa.sh | bash
apt-get install ros-noetic-mrs-lib ros-noetic-pcl-ros- Clone and build via
catkin
cd <ROS1_WORKSPACE>/src
git clone git@github.com:ctu-mrs/RMS.git
catkin build- Launch as nodelet:
roslaunch rms rms_nodelet.launch NS:=<NAMESPACE> points_in:=<POINTS IN TOPIC> points_out:=<POINTS OUT TOPIC>- Use as library in your code:
- add
rmsamong dependencies inCMakeLists.txtandpackage.xmland include the<rms/rms.h>header file - basic usage:
#include <rms/rms.h> ... // Initialize ros::NodeHandle nh; mrs_lib::ParamLoader param_loader(nh, "RMS"); RMS rms = RMS(param_loader); ... // Use sensor_msgs::PointCloud2::Ptr msg = ...; rms->sample(msg); // 'msg' now contains sampled data
- example usage:
RMSNodeletimplemented in src/rms_nodelet.cpp
To complement the in-paper experiments, we offer comparison on the MulRan dataset by plugging its 3D LiDAR (Ouster OS1-64) data to the KISS-ICP odometry. For ROS Noetic, you may follow this workflow:
- Click here to download the
Sejong01sequence rosbag (beware: 56 GB). - Install RMS (see
Installationabove). - Clone, compile, and source our KISS-ICP fork (minor changes made for ROS Noetic and launching).
cd ~/ROS1_WORKSPACE/src
git clone git@github.com:petrapa6/kiss-icp.git
cd kiss_icp
git checkout noetic
catkin build --this
source ~/ROS1_WORKSPACE/devel/setup.sh- Launch as:
roslaunch kiss_icp odometry.launch bagfile:=<PATH TO ROSBAG> topic:=/mulran/velo/pointclouds use_RMS:=[true | false]Results for the Sejong01 experiment here.
APE of the experiment (voxelization in blue, RMS in orange):

@article{petracek2024rms,
author = {Petracek, Pavel and Alexis, Kostas and Saska, Martin},
title = {{RMS: Redundancy-Minimizing Point Cloud Sampling for Real-Time Pose Estimation}},
journal = {IEEE Robotics and Automation Letters},
year = {2024},
volume = {9},
number = {6},
pages = {5230--5237},
doi = {10.1109/LRA.2024.3389820}
}This work was supported
- by CTU grant no. SGS23/177/OHK3/3T/13,
- by the Czech Science Foundation under research project No. 23-06162M,
- by the European Union under the project Robotics and advanced industrial production (reg. no. CZ.02.01.01/00/22_008/0004590), and
- by the Research Council of Norway Award NO-321435.