ROS Catkin package to use different URDF configurations for the Turtlebot 2
- Make your catkin workspace:
mkdir -p ~/catkin_ws/srccatkin_init_workspace ~/catkin_ws/srccatkin_make -C ~/catkin_ws
- Clone this repo to your workspace:
git clone https://github.com/Dabit-Industries/turtlebot_custom_description ~/catkin_ws/src
- Source your workspace
source ~/catkin_ws/devel/setup.sh
- Run ROS core:
roscore
- Launch the robot model
source ~/catkin_ws/devel/setup.shroslaunch turtlebot_custom_description robot_model_.8m_tall.launch
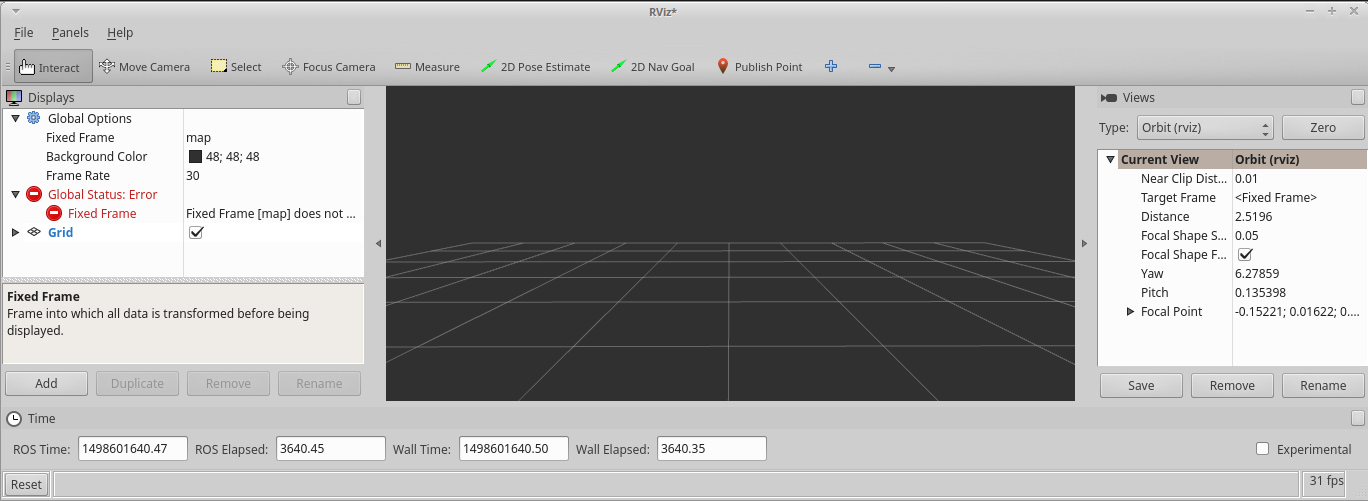
- Launch rviz
source ~/catkin_ws/devel/setup.shrosrun rviz rviz
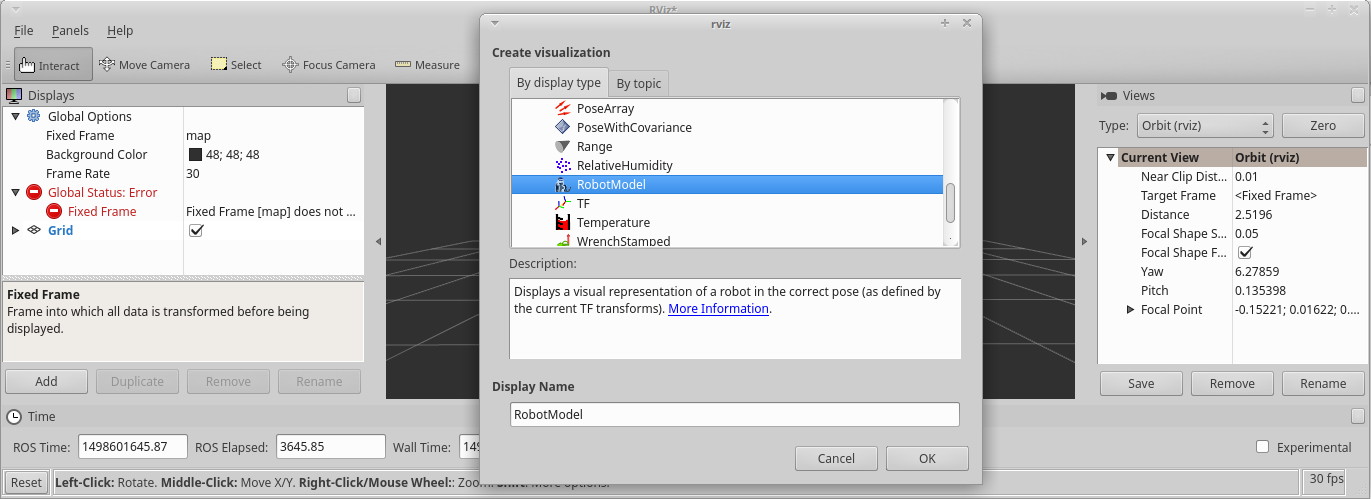
- Configure RVIZ
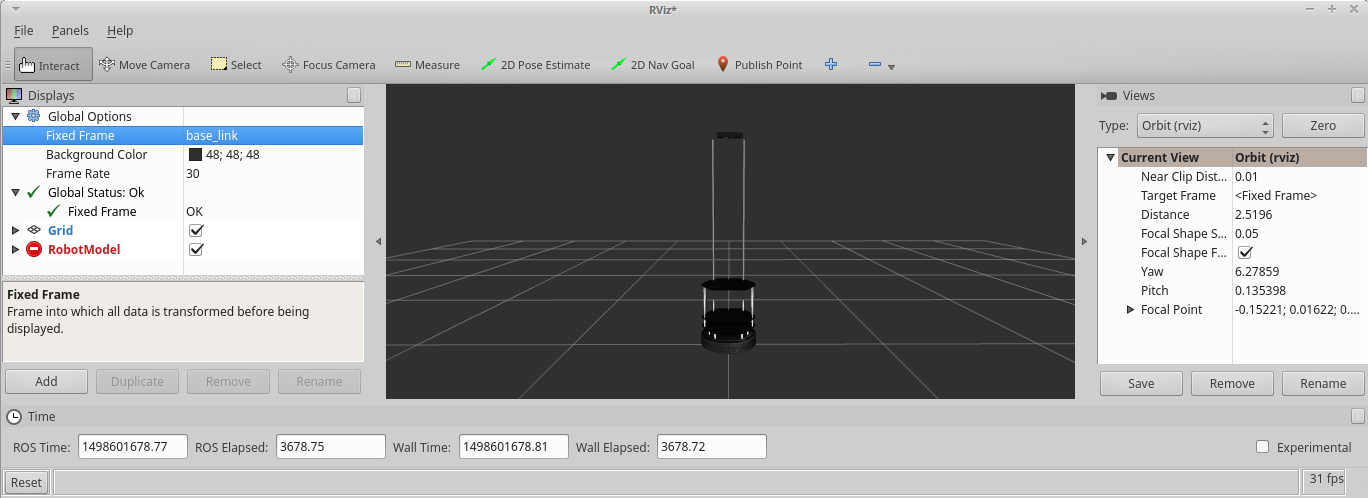



- Turtlebot2 Kobuki Astra:
- Turtlebot 1.2m tall:
- Turtlebot Quanergy M8:



