![]()
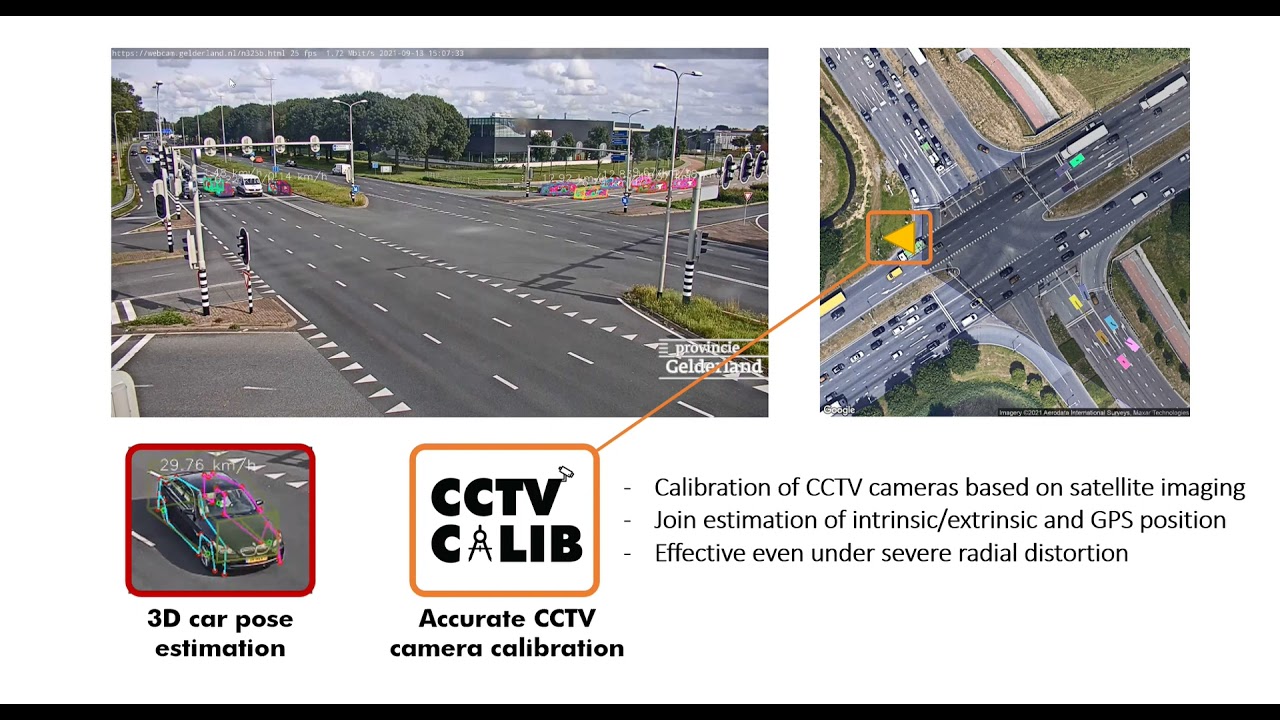
CCTV-Calib is a python toolbox to calibrate outdoor CCTV cameras via satellite images. Further technical details can be found in the paper. Important notice: A mouse with a wheel is required to properly use the toolbox.

matplotlib==2.1.1
numpy==1.13.3
opencv_python==4.1.2.30
PyQt5==5.15.6
requests==2.18.4
scipy==1.4.1
torch==1.4.0
To run the GUI toolbox, simply type python cctv_calib.py in the terminal.
A pre-requisite is to have a satellite of the scene observed by the surveillance camera. CCTV-Calib contains a module to automatically extract download the appropriate satellite image and to generate the associated meta-data. To generate this image from Google Maps, press Create from Google and a new window will pop, here you need to set your Google API key and the longitude and lattitude GPS position of the camera via the fields lon and lat (WGS84). Finally, the image can be generated by pressing Generate image (do not forget to unzoom using the mouse wheel to be sure to see the entire picture). The zoom of the image can also be adapted, when the satellite view is satisfying it can be saved by pressing Save image and points. Two files will be created, namely, the picture your_satellite_image.png and the *.yml file your_satellite_image.yml.
This yml file is composed as follows:
%YAML:1.0
---
pts_gps: !!opencv-matrix
rows: 4
cols: 2
dt: d
data: [ 3.5694351284978481e+01, 1.3969852068607256e+02,
3.5694351284978481e+01, 1.3970023729984209e+02,
3.5692957140277940e+01, 1.3970023729984209e+02,
3.5692957140277940e+01, 1.3969852068607256e+02 ]
pts_sat: !!opencv-matrix
rows: 4
cols: 2
dt: d
data: [ 0., 0., 1280., 0., 1280., 1280., 0., 1280. ]This file contains the pixelic location of the 4 corner of the satellite view and their respective GPS coordinates. If you do not want to spend money on Google Maps, you can also create this file yourself by providing at least 3 corresponding points yourself.
- Load the satellite image
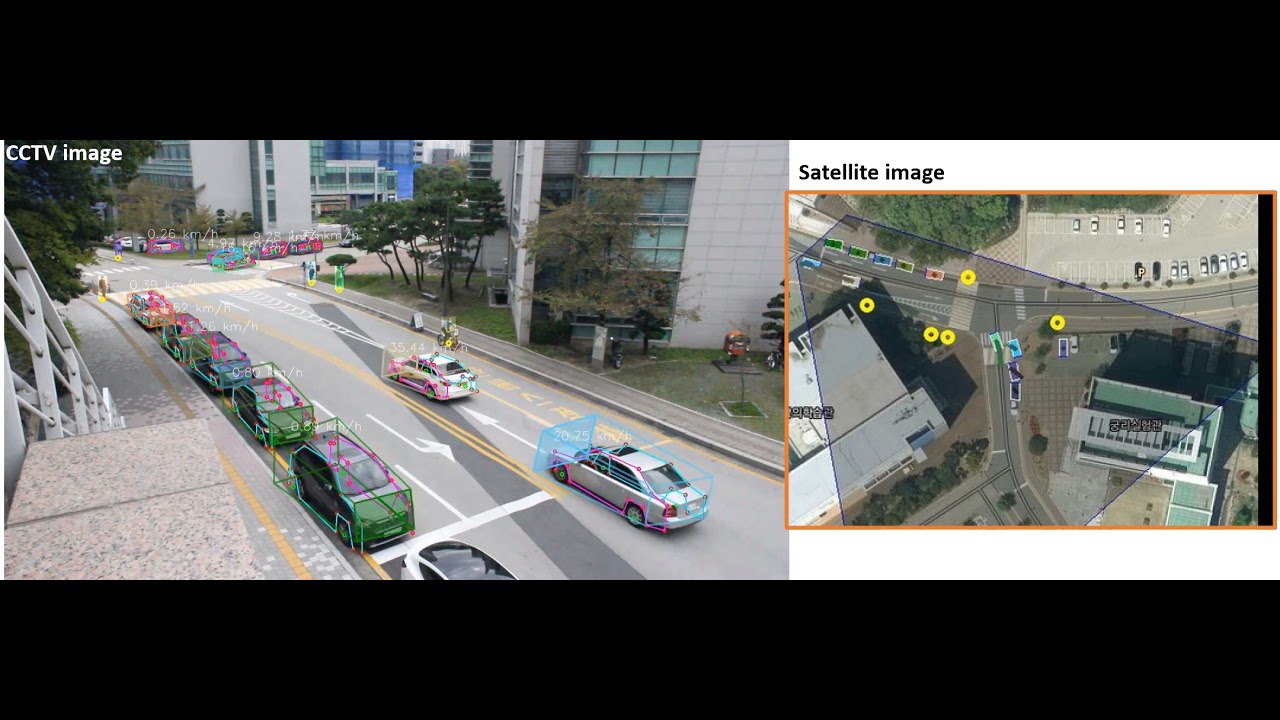
Now that your satellite image is ready, you can open it in CCTV-Calib: Load Satellite Image. Then load the corresponding metadata containing the correspondences via Load Sat <-> GPS points, if you do not load this data, the calibration will not be done at a metric scale and the GPS position will be not computed properly.
-
Add a CCTV camera to be calibrated CCTV-Calib has the ability to calibrate multiple camera from a single satellite image. To include a new CCTV camera to be calibrated, simply press
Add new cameraand select the image/video acquired from the camera of interest (if a video is loaded, a background substration will be processed which can take up to a few minutes depending on the size of the video). Then the image will appear on the right handside. -
Find initial cctv<->satellite correspondences
-
Automatic correspondance Now it is time to proceed to the original matching between the satellite view and the CCTV image. For simplicity, we recommend using the automatic strategy via SuperGlue by clicking on the button
Automatic keypoints. First the satellite image should be manually rotated by the user with the buttons↶and↷to align the satellite image as much as possible with the CCTV view. Thereafter a ROI have to be selected on the satellite view by holding the right mouse click. Then simply pressCompute keypoints matchingand the matching result will appear on the right handside. If you are satisfied by this matching pressApply. If the matching is not correct you can rotate and select another ROI. -
Select cctv<->satellite correspondences manually If the automatic correspondance matching failed, you can manually select a set of correspondance on both images. For that purpose, press the button
Select keypointsto open the keypoints selection module. First you can set the number of points you would like to provide, note that a minimum of 4 points are requiered to calibrate a perspective camera without distortion. Usually 6 or 7 points are sufficient to calibrate any traffic surveillance camera. You can freely zoom (mouse wheel) and navigate through the images (by pressing the wheel of the mouse). The right mouse button can be used to set a ROI on the satellite image and to zoom on the cctv image. The point correspondance can be selected with a left click, when a corresponding keypoint is selected on both images, it is possible to move to the next keypoint by pressingspace(space will reset to view to the last ROI selected on the satellite view) orNor by manually changing the value incurrent points. When all the keypoints have been selected, you can pressApply.
-
Set your pose estimation algorithm Now you can proceed to the camera calibration, by default only the correspondance you have selected will be used for the calibration. You can directly calibrate the camera by pressing
Calibrate Cameraand check the validadity of the resulting parameters by inspecting the resulting image overlayDisplay overlay. Looking at the distortion correction, grid and horizon line, gives also good indication regarding the quality of the calibration (in the main window). If you are not satisfied with the obtained results, you can modify the pose estimation algorithmPnP algorithm. For instance, if the camera contains a limited amount of distortion, the optionP4Pforhomographymight lead to be results. If you do not want to refine the intrinsic parameters of the camera (for instance if you want to assume zero radial distortion) the optionRefine Intrinsics and extrinsicscan be unticked. Note that the RANSAC threshold can also be adjusted accordingly with your image resolution. -
Include refinement techniques CCTV-Calib contains two refinement strategies that can be used jointly or individually. The first one is a dense registration techniques that can be activated via
Activate dense registration. This dense registration can be achieved by minimizing the photometric difference between the CCTV and the warped satellite image or by using a binarized version of them (in order to segment the roadmarkings). The user can set the binary thresholds at will via the moduleSet thresholds. The dense registration is not recommended since SP+SG refinement leads to better results When the cctv and satellite images are too disimilar this refinement option can be kept deactivated. Alternatively, a sparse matching strategy can be used, this option can be activated viaActivate keypoints matching. The SP+SG algorithm usually provides satisfying results (KLT or GMS matching can also be used but is often resulting in less accurate calibration). After you have selected your refinement preferences you can pressCalibrate camera. -
Add additional cameras You can include as many cameras as you would like and calibrate them. They will all appear on the satellite view and you can freely navigate between different cameras.
-
Saving your results Set your project name and press
Save results. The resulting calibration is stored in one *.yml file per camera.


Over trials over surveillance cameras around the world, CCTV-Calib mostly provided accurate and stable results. However, it still suffer a certain number of limitations that we are listing here:
- The satellite image is assumed to be an orthographic view
- The correspondances are assumed to lie on a planar surface (thus the presence of roadmarkings is preferable)
- If the roadmarkings have been modified between the capture of the cctv image and the satellite image, it makes the calibration rather complex and the refinement techniques cannot be applied
- The cameras are calibrated individually even if they share a field of view
- The principal point located in the center of the image is assumed
In order to evaluate the accuracy of our calibration pipeline, we create a novel synthetic dataset composed of real satellite images as well as virtual views synthesized from Google Earth Studio. This dataset consists of 100 images captured in 10 different cities around the globe: Dijon, Brussels, Zurich, Paris, Montreal, Taipei, London, Tokyo, New York and Berlin. Ten satellite-CCTV image pairs have been captured per city. Each 1920x1080px CCTV image is provided with its ground truth GPS location, altitude (w.r.t. the sea level), pan (w.r.t. North), tilt (w.r.t. the ground plane) and focal length. Their corresponding 1280x1280px satellite images are provided with their meta-data.

Google earth dataset (1.8GB): https://bosch.frameau.xyz/index.php/s/sqaNrPWL4KifJjK