Repo for my graduation project.
My master degree graduation project is about coordination control for mobile manipulator. My goal is to acheive movement control of manipulator and mobile base simultaneously.
- Ubuntu 14.04
- ROS Indigo
-
ur_modern_driver, Source at src/ur_modern_driver
-
hokuyo_node, You can install hokuyo_node via command line:
sudo apt-get install ros-indigo-hokuyo-node- laser_scan_matcher, This is a node from scan_tools, source at src/scan_tools/laser_scan_matcher
Provide the velocity control interface for ur.
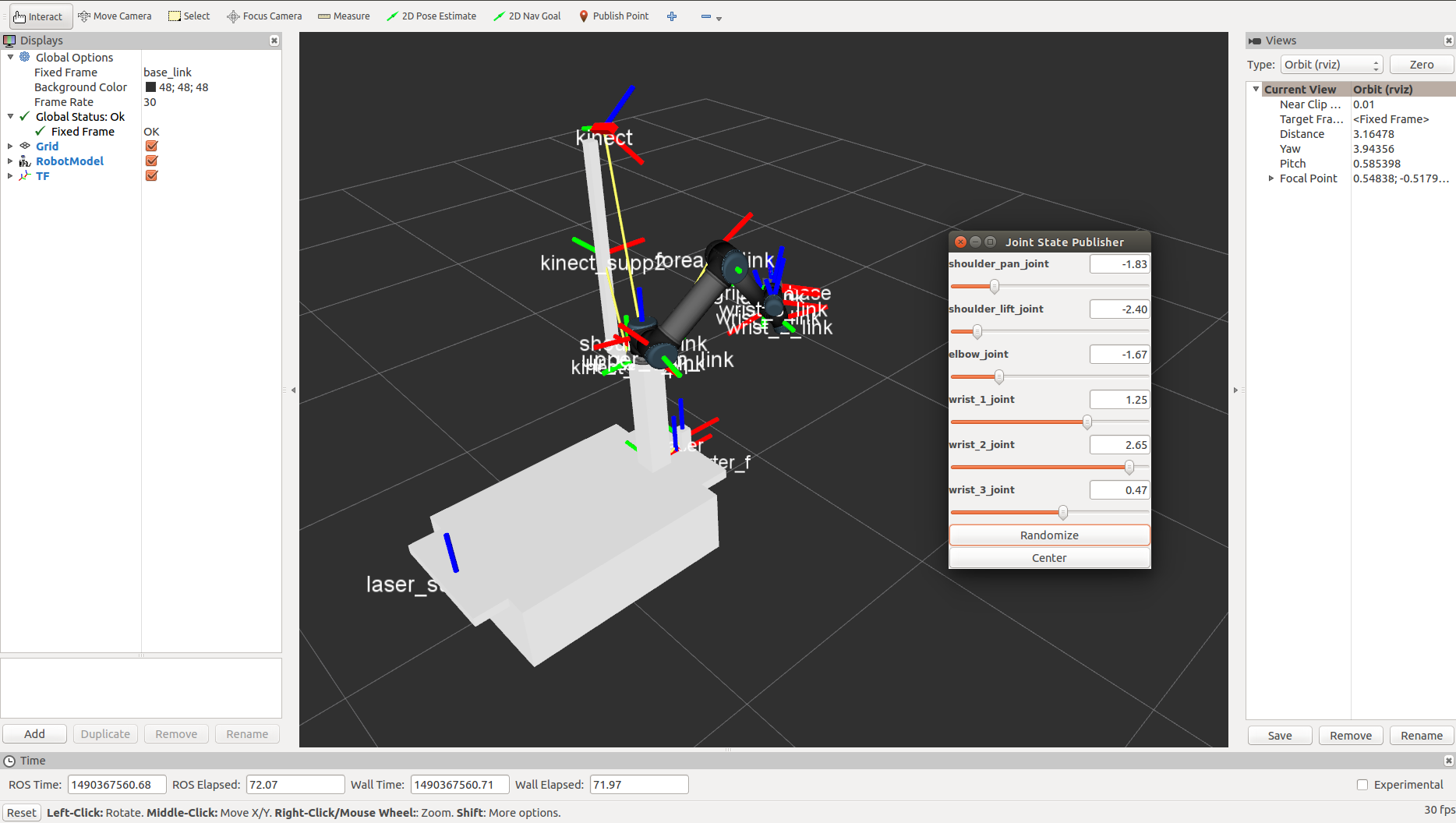
Description files for mobile manipulator. Source files are here: src/aimm_description
Test this package by cd to src/aimm_description/ and using command:
sh display.shYou will see the effect like below if everything is alright.
MoveIt! config package for mobile manipulator
Launch this module with a custom launch file:
roslaunch laser_scan_matcher localization.launchTODO
Create MoveIt! config package for mobile manipulator
TODO