Copyright (C) 2018 NVIDIA Corporation. All rights reserved. Licensed under the CC BY-NC-SA 4.0 license (https://creativecommons.org/licenses/by-nc-sa/4.0/legalcode).
This is the PyTorch implementation of our CVPR 2018 paper
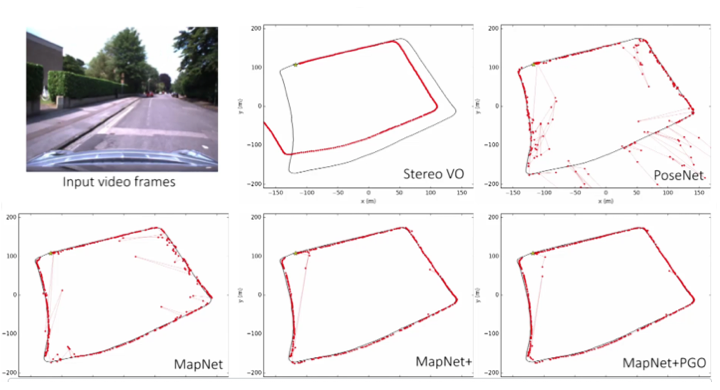
"Geometry-Aware Learning of Maps for Camera Localization" - CVPR 2018 (Spotlight). Samarth Brahmbhatt, Jinwei Gu, Kihwan Kim, James Hays, and Jan Kautz
MapNet uses a Conda environment that makes it easy to install all dependencies.
-
Install miniconda with Python 2.7.
-
Create the
mapnetConda environment:conda env create -f environment.yml. -
Activate the environment:
conda activate mapnet_release. -
Note that our code has been tested with PyTorch v0.4.1 (the environment.yml file should take care of installing the appropriate version).
We support the
7Scenes
and Oxford RobotCar datasets right
now. You can also write your own PyTorch dataloader for other datasets and put it in the
dataset_loaders directory. Refer to
this README file for more details.
The datasets live in the data/deepslam_data directory. We provide skeletons
with symlinks to get you started. Let us call your 7Scenes download directory
7SCENES_DIR and your main RobotCar download directory (in which you untar all
the downloads from the website) ROBOTCAR_DIR. You will need to make the following
symlinks:
cd data/deepslam_data && ln -s 7SCENES_DIR 7Scenes && ln -s ROBOTCAR_DIR RobotCar_download
-
Download this fork of the dataset SDK, and run
cd scripts && ./make_robotcar_symlinks.shafter editing theROBOTCAR_SDK_ROOTvariable in it appropriately. -
For each sequence, you need to download the
stereo_centre,voandgpstar files from the dataset website. -
The directory for each 'scene' (e.g.
full) has .txt files defining the train/test split. While training MapNet++, you must put the sequences for self-supervised learning (dataset T in the paper) in thetest_split.txtfile. The dataloader for the MapNet++ models will use both images and ground-truth pose from sequences intrain_split.txtand only images from the sequences intest_split.txt. -
To make training faster, we pre-processed the images using
scripts/process_robotcar_images.py. This script undistorts the images using the camera models provided by the dataset, and scales them such that the shortest side is 256 pixels.
The trained models for all experiments presented in the paper can be downloaded
here.
The inference script is scripts/eval.py. Here are some examples, assuming
the models are downloaded in scripts/logs. Please go to the scripts folder to run the commands.
- MapNet++ with pose-graph optimization (i.e., MapNet+PGO) on
heads:
$ python eval.py --dataset 7Scenes --scene heads --model mapnet++ \
--weights logs/7Scenes_heads_mapnet++_mapnet++_7Scenes/epoch_005.pth.tar \
--config_file configs/pgo_inference_7Scenes.ini --val --pose_graph
Median error in translation = 0.12 m
Median error in rotation = 8.46 degrees

-
For evaluating on the
trainsplit remove the--valflag -
To save the results to disk without showing them on screen (useful for scripts), add the
--output_dir ../results/flag -
See this README file for more information on hyper-parameters and which config files to use.
-
MapNet++ on
heads:
$ python eval.py --dataset 7Scenes --scene heads --model mapnet++ \
--weights logs/7Scenes_heads_mapnet++_mapnet++_7Scenes/epoch_005.pth.tar \
--config_file configs/mapnet.ini --val
Median error in translation = 0.13 m
Median error in rotation = 11.13 degrees
- MapNet on
heads:
$ python eval.py --dataset 7Scenes --scene heads --model mapnet \
--weights logs/7Scenes_heads_mapnet_mapnet_learn_beta_learn_gamma/epoch_250.pth.tar \
--config_file configs/mapnet.ini --val
Median error in translation = 0.18 m
Median error in rotation = 13.33 degrees
- PoseNet (CVPR2017) on
heads:
$ python eval.py --dataset 7Scenes --scene heads --model posenet \
--weights logs/7Scenes_heads_posenet_posenet_learn_beta_logq/epoch_300.pth.tar \
--config_file configs/posenet.ini --val
Median error in translation = 0.19 m
Median error in rotation = 12.15 degrees
- MapNet++ with pose-graph optimization on
loop:
$ python eval.py --dataset RobotCar --scene loop --model mapnet++ \
--weights logs/RobotCar_loop_mapnet++_mapnet++_RobotCar_learn_beta_learn_gamma_2seq/epoch_005.pth.tar \
--config_file configs/pgo_inference_RobotCar.ini --val --pose_graph
Mean error in translation = 6.74 m
Mean error in rotation = 2.23 degrees

- MapNet++ on
loop:
$ python eval.py --dataset RobotCar --scene loop --model mapnet++ \
--weights logs/RobotCar_loop_mapnet++_mapnet++_RobotCar_learn_beta_learn_gamma_2seq/epoch_005.pth.tar \
--config_file configs/mapnet.ini --val
Mean error in translation = 6.95 m
Mean error in rotation = 2.38 degrees
- MapNet on
loop:
$ python eval.py --dataset RobotCar --scene loop --model mapnet \
--weights logs/RobotCar_loop_mapnet_mapnet_learn_beta_learn_gamma/epoch_300.pth.tar \
--config_file configs/mapnet.ini --val
Mean error in translation = 9.84 m
Mean error in rotation = 3.96 degrees
The executable script is scripts/train.py. Please go to the scripts folder to run these commands. For example:
- PoseNet on
chessfrom7Scenes:python train.py --dataset 7Scenes --scene chess --config_file configs/posenet.ini --model posenet --device 0 --learn_beta --learn_gamma

-
MapNet on
chessfrom7Scenes:python train.py --dataset 7Scenes --scene chess --config_file configs/mapnet.ini --model mapnet --device 0 --learn_beta --learn_gamma -
MapNet++ is finetuned on top of a trained MapNet model:
python train.py --dataset 7Scenes --checkpoint <trained_mapnet_model.pth.tar> --scene chess --config_file configs/mapnet++_7Scenes.ini --model mapnet++ --device 0 --learn_beta --learn_gamma
For example, we can train MapNet++ model on heads from a pretrained MapNet model:
$ python train.py --dataset 7Scenes \
--checkpoint logs/7Scenes_heads_mapnet_mapnet_learn_beta_learn_gamma/epoch_250.pth.tar \
--scene heads --config_file configs/mapnet++_7Scenes.ini --model mapnet++ \
--device 0 --learn_beta --learn_gamma
For MapNet++ training, you will need visual odometry (VO) data (or other sensory inputs such as noisy GPS measurements). For 7Scenes, we provided the preprocessed VO computed with the DSO method. For RobotCar, we use the provided stereo_vo. If you plan to use your own VO data (especially from a monocular camera) for MapNet++ training, you will need to first align the VO with the world coordinate (for rotation and scale). Please refer to the "Align VO" section below for more detailed instructions.
The meanings of various command-line parameters are documented in
scripts/train.py. The values of various hyperparameters are defined in a
separate .ini file. We provide some examples in the scripts/configs directory,
along with a README file explaining some
hyper-parameters.
If you have visdom = yes in the config file, you will need to start a Visdom
server for logging the training progress:
python -m visdom.server -env_path=scripts/logs/.
Calculates the network attention visualizations and saves them in a video
- For the MapNet model trained on
chessin7Scenes:
$ python plot_activations.py --dataset 7Scenes --scene chess
--weights <filename.pth.tar> --device 1 --val --config_file configs/mapnet.ini
--output_dir ../results/
Check here for an example video of computed network attention of PoseNet vs. MapNet++.
This has to be done before using VO in MapNet++ training. The executable script
is scripts/align_vo_poses.py.
-
For the first sequence from
chessin7Scenes:python align_vo_poses.py --dataset 7Scenes --scene chess --seq 1 --vo_lib dso. Note that alignment for7Scenesneeds to be done separately for each sequence, and so the--seqflag is needed -
For all
7Scenesyou can also use the scriptalign_vo_poses_7scenes.shThe script stores the information at the proper location indata
This must be calculated before any training. Use the scripts/dataset_mean.py,
which also saves the information at the proper location. We provide pre-computed
values for RobotCar and 7Scenes.
Calculates the mean and stdev and saves them automatically to appropriate files
python calc_pose_stats.py --dataset 7Scenes --scene redkitchen
This information is needed to normalize the pose regression targets, so this
script must be run before any training. We provide pre-computed values for
RobotCar and 7Scenes.
python plot_vo_poses.py --dataset 7Scenes --scene heads --vo_lib dso --val. To save the
output instead of displaying on screen, add the --output_dir ../results/ flag
The scripts/process_robotcar_gps.py script must be run before using GPS for
MapNet++ training. It converts the csv file into a format usable for training.
This is advisable to do beforehand to speed up training. The
scripts/process_robotcar_images.py script will do that and save the output
images to a centre_processed directory in the stereo directory. After the
script finishes, you must rename this directory to centre so that the dataloader
uses these undistorted and demosaiced images.
If you find this code useful for your research, please cite our paper
@inproceedings{mapnet2018,
title={Geometry-Aware Learning of Maps for Camera Localization},
author={Samarth Brahmbhatt and Jinwei Gu and Kihwan Kim and James Hays and Jan Kautz},
booktitle={IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2018}
}