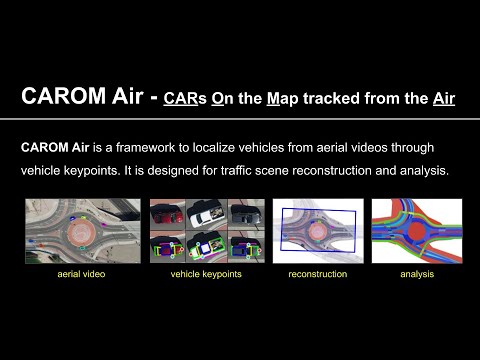
CAROM Air means "CARs On the Map tracked from the Air". It is our recent work to track and localize vehicles using aerial videos taken by drones. It is designed for traffic scene reconstruction and analysis. See the following short demo video and a more detailed presentation video. Our research paper will be published at IEEE ICRA 2023, and our dataset will be made openly available gradually through the latter half of 2023. A preview of the dataset can be accessed from this document.
More detailed demo videos for qualitative evaluation are shown as follows.
- Keypoints and masks
- Tracking evaluation
- Model fitting evaluation
- Localization evaluation
- Track 3a (Vehicle A, seven passes: 0:09, 3:08, 4:50, 5:58, 7:39, 10:34, 14:14)
- Track 3b (Vehicle A, eight passes: 0:00, 2:30, 3:36, 5:01, 6:41, 11:04, 12:08, 13:34)
- Track 3c (Vehicle A, five passes: 0:12, 5:14, 8:56, 10:00, 12:00)
- Track 3d (Vehicle A, four passes: 0:00, 1:30, 4:30, 5:32)
- track 3e (Vehicle B, four passes: 1:34, 6:14, 10:12, 12:35)
- track 3f (Vehicle B, three passes: 0:53, 4:10, 6:22)
- track 3g (Vehicle B, six passes: 1:49, 4:54, 8:17, 10:56, 15:01, 17:30)
- track 3h (Vehicle B, seven passes: 2:28, 3:50, 7:38, 8:41, 12:47, 14:19, 17:13)
- track 3i (Vehicle B, four passes: 0:28, 4:14, 6:29, 8:47)
- Dataset demo
-
Duo Lu, Eric Eaton, Matt Weg, Wei Wang, Steven Como, Jeffrey Wishart, Hongbin Yu, Yezhou Yang, "CAROM Air - Vehicle Localization and Traffic Scene Reconstruction from Aerial Video", IEEE International Conference on Robotics and Automation (ICRA), 2023. [paper] [pdf] [presentation video]
-
Siddharth Das, Prabin Rath, Duo Lu, Tyler Smith, Jeffrey Wishart, Hongbin Yu, "Comparison of Infrastructure-and Onboard Vehicle-Based Sensor Systems in Measuring Safety Metrics", SAE WCX, 2023. [paper]
-
Duo Lu, Sam Haines, Varun Jammula, Prabin Rath, Hongbin Yu, Yezhou Yang, Jeffrey Wishart, "Validation and Analysis of Driving Safety Assessment Metrics in Real-world Car-Following Scenarios with Aerial Videos", SAE WCX, 2024. [paper] [slides]
-
Prabin Kumar Rath, Blake Harrison, Duo Lu, Yezhou Yang, Jeffrey Wishart, Hongbin Yu, "Evaluating Safety Metrics for Vulnerable Road Users at Urban Traffic Intersections Using High-Density Infrastructure LiDAR System", SAE WCX, 2024. [paper] [slides]
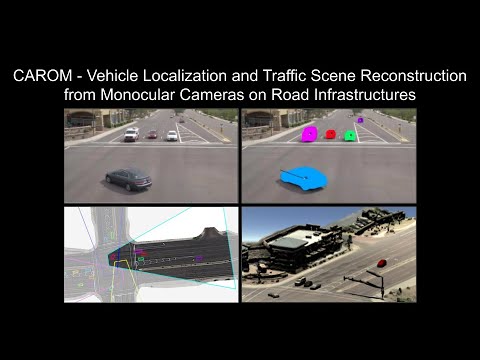
CAROM means "CARs On the Map". It is a framework to track and localize vehicles using monocular traffic monitoring cameras on road infrastructures. The tracking results can be stored in files or in a database as records. Using the results, a traffic scene can be reconstructed and replayed on a map. See the following short demo video, a presentation, a preprint version of our paper published at IEEE ICRA 2021, and a more detailed paper on our work about the infrastructure published by SAE.
Through collaborating with the Maricopa County Department of Transportation (MCDOT) in Arizona, US, we constructed a small benchmarking dataset containing GPS data, infrastructure-based camera videos, and drone videos to validate the vehicle tracking results. On average, the localization error is approximately 0.8 m and 1.7 m on average within the range of 50 m and 120 m from the cameras, respectively. Unfortunately, due to privacy and data ownership issues, we won't be able to make our dataset available here. However, interested parties are encouraged to contact Institute of Automated Mobility (IAM) in Arizona for collaboration. An open version of the code is available at the GitHub repository managed by IAM through this link.
More detailed demo videos for qualitative evaluation are shown as follows.
- Demo videos at site 1A (Eastbound of the intersection, Anthem, AZ, ~10 minutes)
- Demo videos at site 1B (Northbound of the intersection, Anthem, AZ, ~10 minutes)
- Demo videos at site 1C (Westbound of the intersection, Anthem, AZ, ~10 minutes)
- Demo videos at site 1D (Southbound of the intersection, Anthem, AZ, ~10 minutes)
- Demo videos at site 2 (East Osborn Road, Scottsdale, AZ, ~10 minutes)
- Validation with aerial videos at site 2 (East Osborn Road, Scottsdale, AZ)
- Demo on four view fusion at site 1 (Detailed slow motion, Anthem, AZ)
- Demo on speed estimation at site 1 (Detailed slow motion, Anthem, AZ)
- Duo Lu, Varun C Jammula, Steven Como, Jeffrey Wishart, Yan Chen, Yezhou Yang, "CAROM - Vehicle Localization and Traffic Scene Reconstruction from Monocular Cameras on Road Infrastructures", IEEE International Conference on Robotics and Automation (ICRA), 2021.
- Niraj Altekar, Steven Como, Duo Lu, Jeffrey Wishart, Donald Bruyere, Faisal Saleem, K Larry Head, "Infrastructure-Based Sensor Data Capture Systems for Measurement of Operational Safety Assessment (OSA) Metrics", SAE WCX, 2021.
- Anshuman Srinivasan, Yoga Mahartayasa, Varun Chandra Jammula, Duo Lu, Steven Como, Jeffrey Wishart, Maria Elli, Yezhou Yang, Hongbin Yu, "Infrastructure-based LiDAR Monitoring for Assessing Automated Driving Safety", SAE WCX, 2022.
- Jeffrey Wishart, Yan Chen, Steven Como, Narayanan Kidambi, Duo Lu, Yezhou Yang, "Fundamentals of Connected and Automated Vehicles", SAE International, 2022.