- Simulate the kinematics of a robot with a differential drive
- Simulate the motion control of a robot with a differential drive and show the resulting paths w.r.t. different control laws
- Simulate the process of mapping of a room by using a moving range sensor which knows its location accurately (randomly walking, or moving along a circle).
- Simulate the process of localization with GPS signals. When sender-receiver clocks are either synchronized or not synchronized, how many satellites are needed to achieve 3D accurate positions, respectively?
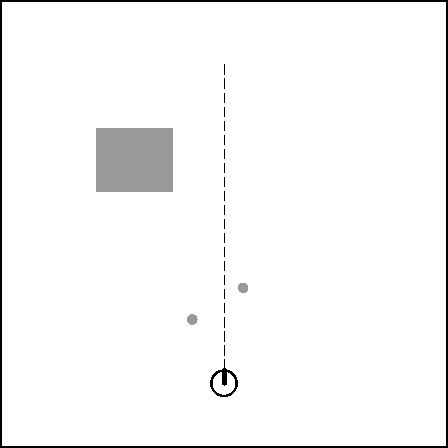
- Generate samples of the odometry-based motion model (N=500).
- Generate samples of the velocity-based motion model for following cases (N=500).
- Generate the map-consistent probability model in the following situation.
- Generate the beam-based measurement models with a mixture of four distributions (by choosing five different sets of parameters).
- Given the following map, please generate scan measurement probability model and the beam measurement probability model.
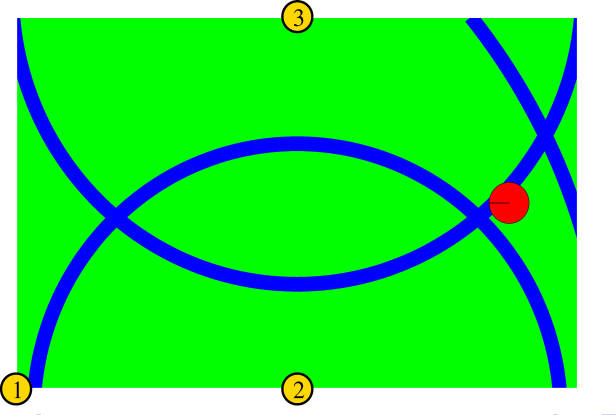
- Generate the following landmark measurement probability model by using 3 ranging sensors.