Face recognition from camera with Dlib
Introduction
Detect and recognize single/multi-faces from camera;
调用摄像头进行人脸识别, 支持多张人脸同时识别;
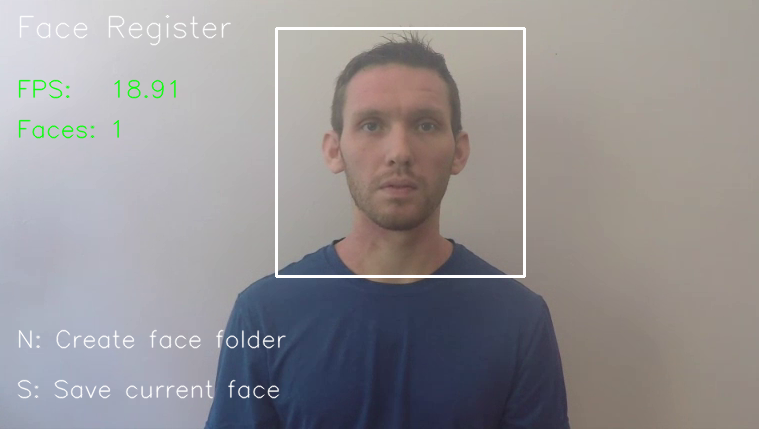
摄像头人脸录入 / Face register
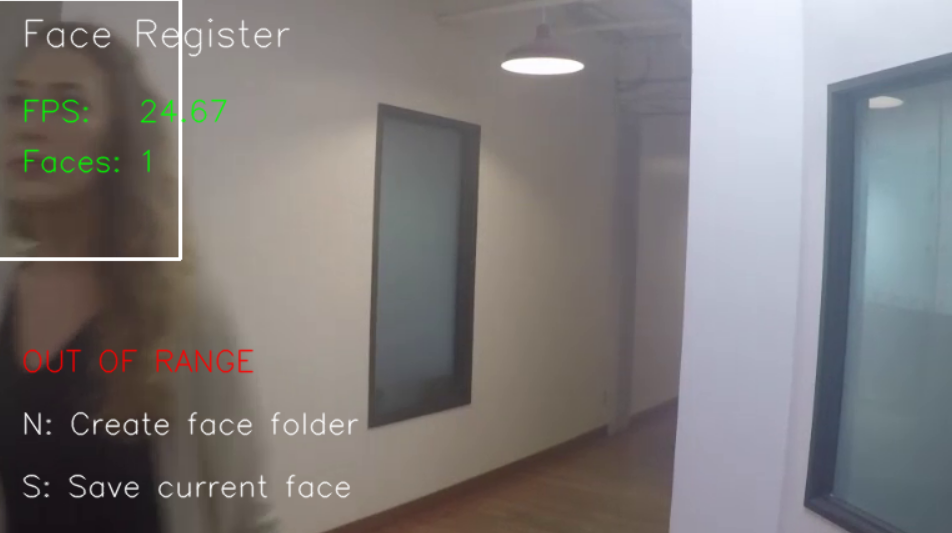
请不要离摄像头过近, 人脸超出摄像头范围时会有 "OUT OF RANGE" 提醒 / Please do not be too close to the camera, or you can't save faces with "OUT OF RANGE" warning;
提取特征建立人脸数据库 / Generate face database from images captured
利用摄像头进行人脸识别 / Face recognizer
face_reco_from_camera.py, 对于每一帧都做检测识别 / Do detection and recognition for every frame:

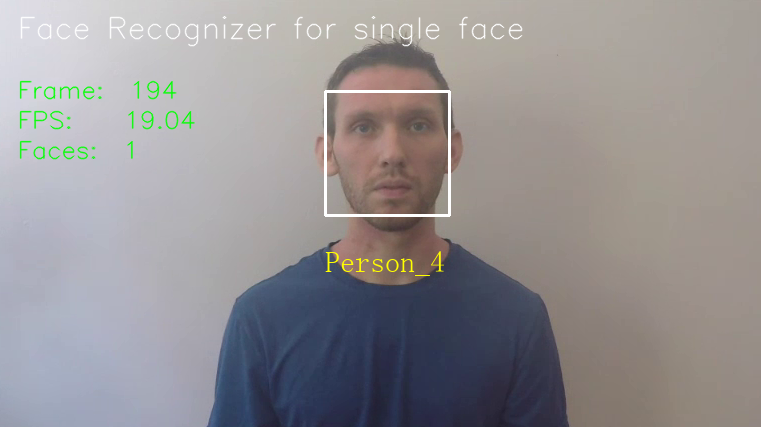
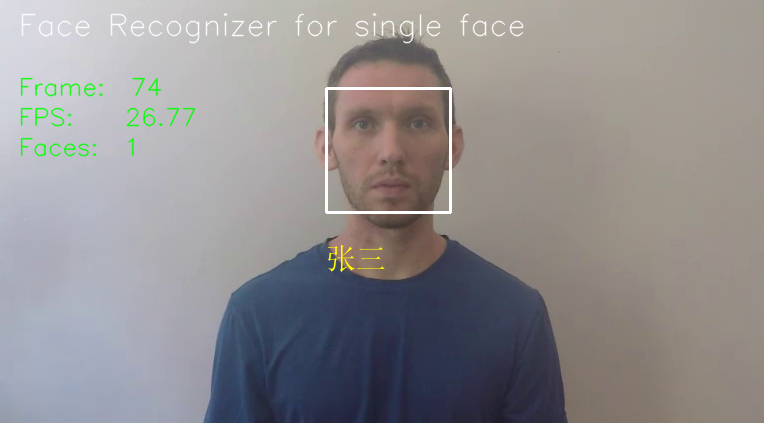
face_reco_from_camera_single_face.py, 对于人脸<=1, 只有新人脸出现才进行再识别来提高 FPS / Do re-reco only for new single face:
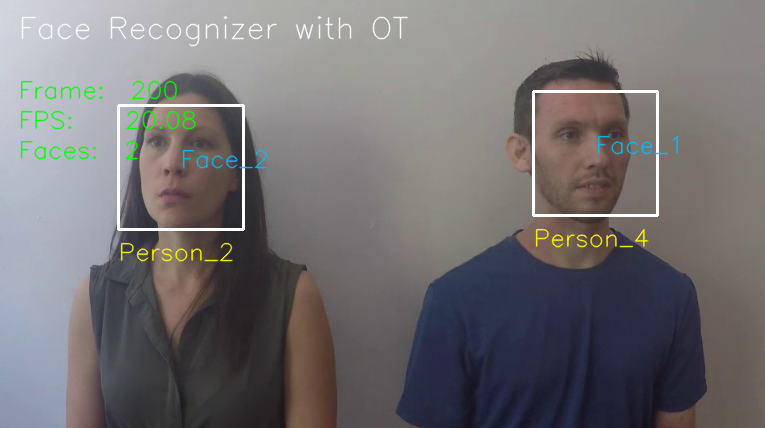
face_reco_from_camera_ot.py, 利用 OT 来实现再识别提高 FPS / Use OT to instead of re-reco for every frame to improve FPS:
定制显示名字, 可以写中文 / Show chinese name:






** 关于精度 / About accuracy:
- When using a distance threshold of
0.6, the dlib model obtains an accuracy of99.38%on the standard LFW face recognition benchmark.
** 关于算法 / About algorithm
- 基于 Residual Neural Network / 残差网络的 CNN 模型;
- This model is a ResNet network with 29 conv layers. It's essentially a version of the ResNet-34 network from the paper Deep Residual Learning for Image Recognition by He, Zhang, Ren, and Sun with a few layers removed and the number of filters per layer reduced by half.
Overview
此项目中人脸识别的实现流程 (no OT, 每一帧都进行检测+识别) / The design of this repo:

实现流程(with OT, 初始帧进行检测+识别, 后续帧检测+质心跟踪) / The design of this repo:

如果利用 OT 来跟踪, 可以大大提高 FPS, 因为做识别时候需要提取特征描述子的耗时很多;
Steps
安装依赖库 / Install some python packages needed
pip3 install opencv-python pip3 install scikit-image pip3 install dlib
下载源码 / Download zip from website or via GitHub Desktop in windows, or git clone repo in Ubuntu
git clone https://github.com/coneypo/Dlib_face_recognition_from_camera
进行人脸信息采集录入 / Register faces
python3 get_face_from_camera.py
提取所有录入人脸数据存入 "features_all.csv" / Features extraction and save into "features_all.csv"
python3 features_extraction_to_csv.py
调用摄像头进行实时人脸识别 / Real-time face recognition
python3 face_reco_from_camera.py
对于人脸数<=1, 调用摄像头进行实时人脸识别 / Real-time face recognition (FPS improved)
python3 face_reco_from_camera_single_face.py
利用 OT 算法, 调用摄像头进行实时人脸识别 / Real-time face recognition with OT (FPS improved)
python3 face_reco_from_camera_ot.py
About Source Code
Repo 的 tree / 树状图:
. ├── get_faces_from_camera.py # Step 1. Face register ├── features_extraction_to_csv.py # Step 2. Feature extraction ├── face_reco_from_camera.py # Step 3. Face recognizer ├── face_reco_from_camera_single_face.py # Step 3. Face recognizer for single person ├── face_reco_from_camera_ot.py # Step 3. Face recognizer with OT ├── face_descriptor_from_camera.py # Face descriptor computation ├── how_to_use_camera.py # Use the default camera by opencv ├── data │ ├── data_dlib # Dlib's model │ │ ├── dlib_face_recognition_resnet_model_v1.dat │ │ └── shape_predictor_68_face_landmarks.dat │ ├── data_faces_from_camera # Face images captured from camera (will generate after step 1) │ │ ├── person_1 │ │ │ ├── img_face_1.jpg │ │ │ └── img_face_2.jpg │ │ └── person_2 │ │ └── img_face_1.jpg │ │ └── img_face_2.jpg │ └── features_all.csv # CSV to save all the features of known faces (will generate after step 2) ├── README.rst └── requirements.txt # Some python packages needed
用到的 Dlib 相关模型函数:
Dlib 正向人脸检测器 (based on HOG), output: <class 'dlib.dlib.rectangles'>
detector = dlib.get_frontal_face_detector() faces = detector(img_gray, 0)
Dlib 人脸 landmark 特征点检测器, output: <class 'dlib.dlib.full_object_detection'>, will use shape_predictor_68_face_landmarks.dat
# This is trained on the ibug 300-W dataset (https://ibug.doc.ic.ac.uk/resources/facial-point-annotations/) # Also note that this model file is designed for use with dlib's HOG face detector. # That is, it expects the bounding boxes from the face detector to be aligned a certain way, the way dlib's HOG face detector does it. # It won't work as well when used with a face detector that produces differently aligned boxes, # such as the CNN based mmod_human_face_detector.dat face detector. predictor = dlib.shape_predictor("data/data_dlib/shape_predictor_68_face_landmarks.dat") shape = predictor(img_rd, faces[i])
Dlib 特征描述子 Face recognition model, the object maps human faces into 128D vectors
face_rec = dlib.face_recognition_model_v1("data/data_dlib/dlib_face_recognition_resnet_model_v1.dat")
Python 源码介绍如下:
get_face_from_camera.py:
进行 Face register / 人脸信息采集录入
- 请注意存储人脸图片时, 矩形框不要超出摄像头范围, 要不然无法保存到本地;
- 超出会有 "out of range" 的提醒;
features_extraction_to_csv.py:
从上一步存下来的图像文件中, 提取人脸数据存入CSV;
- 会生成一个存储所有特征人脸数据的 "features_all.csv";
- size: n*128 , n means n people you registered and 128 means 128D features of the face
face_reco_from_camera.py:
这一步将调用摄像头进行实时人脸识别; / This part will implement real-time face recognition;
- Compare the faces captured from camera with the faces you have registered which are saved in "features_all.csv"
- 将捕获到的人脸数据和之前存的人脸数据进行对比计算欧式距离, 由此判断是否是同一个人;
face_reco_from_camera_single_face.py:
针对于人脸数 <=1 的场景, 区别于 face_reco_from_camera.py (对每一帧都进行检测+识别), 只有人脸出现的时候进行识别;
face_reco_from_camera_ot.py:
只会对初始帧做检测+识别, 对后续帧做检测+质心跟踪;
(optional) face_descriptor_from_camera.py
调用摄像头进行实时特征描述子计算; / Real-time face descriptor computation;
More
Tips:
- 如果希望详细了解 dlib 的用法, 请参考 Dlib 官方 Python api 的网站 / You can refer to this link for more information of how to use dlib: http://dlib.net/python/index.html
- Modify log level to
logging.basicConfig(level=logging.DEBUG)to print info for every frame if needed (Default islogging.INFO) - 代码最好不要有中文路径 / No chinese characters in your code directory
- 人脸录入的时候先建文件夹再保存图片, 先
N再S/ PressNbeforeS
#. 关于 face_reco_from_camera.py 人脸识别卡顿 FPS 低问题, 原因是特征描述子提取很费时间, 光跑 face_descriptor_from_camera.py 中 face_reco_model.compute_face_descriptor 在我的机器上得到的平均 FPS 在 5 左右 (检测在 0.03s, 特征描述子提取在 0.158s, 和已知人脸进行遍历对比在 0.003s 左右), 所以主要提取特征时候耗资源, 可以用 OT 去做追踪 (使用`face_reco_from_camera_ot.py`), 而不是对每一帧都做检测+识别, 识别的性能从 20 FPS -> 200 FPS
可以访问我的博客获取本项目的更详细介绍, 如有问题可以邮件联系我 / For more details, please refer to my blog (in chinese) or mail to me :
- Blog: https://www.cnblogs.com/AdaminXie/p/9010298.html
- 关于 OT 部分的更新在 Blog: https://www.cnblogs.com/AdaminXie/p/13566269.html
- Mail: coneypo@foxmail.com ( Dlib 相关 repo 问题请联系 @foxmail 而不是 @intel )
- Feel free to creatE issue or PR for this repo :)
Thanks for your support.