This package has been tested on ROS Melodic and Noetic, it contains ROS nodes to control motors powered by the ez-Wheel Safety Wheel Drive (SWD®) technology.
 |
 |
 |
|---|---|---|
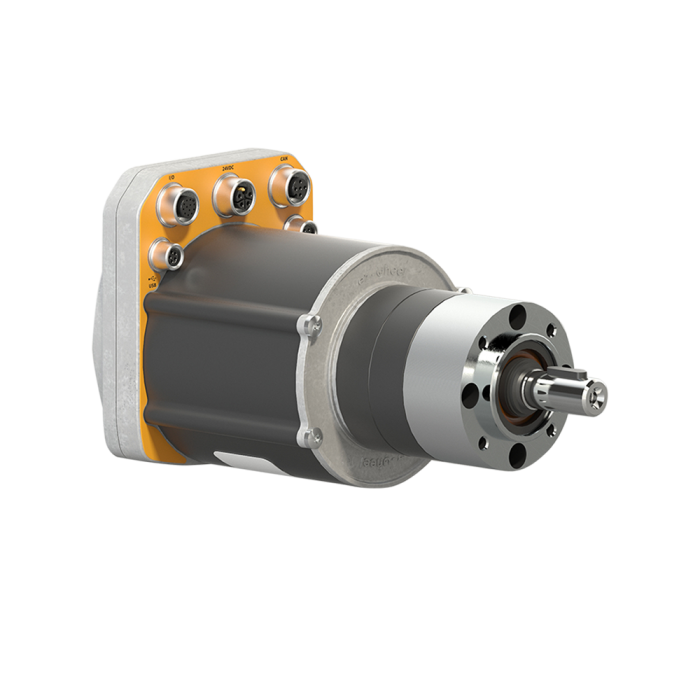
| SWD® Core Safety gear motor |
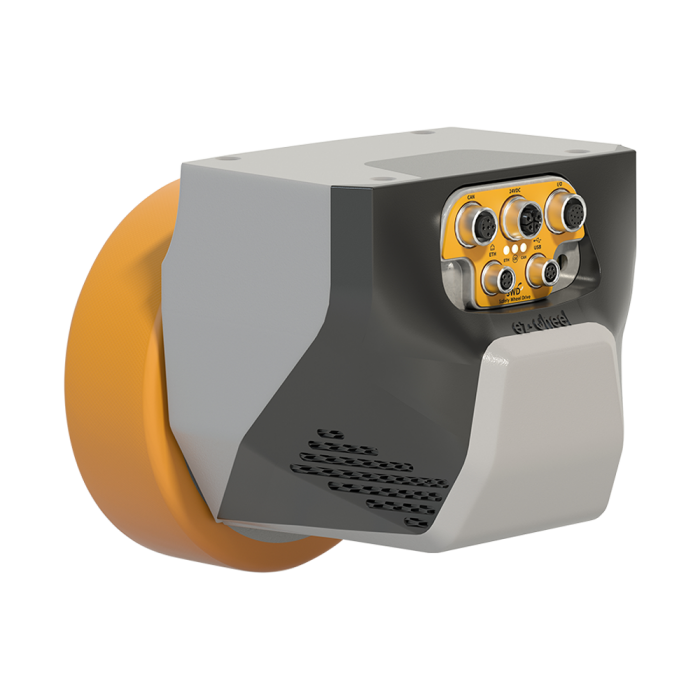
SWD® 150 Safety wheel drive |
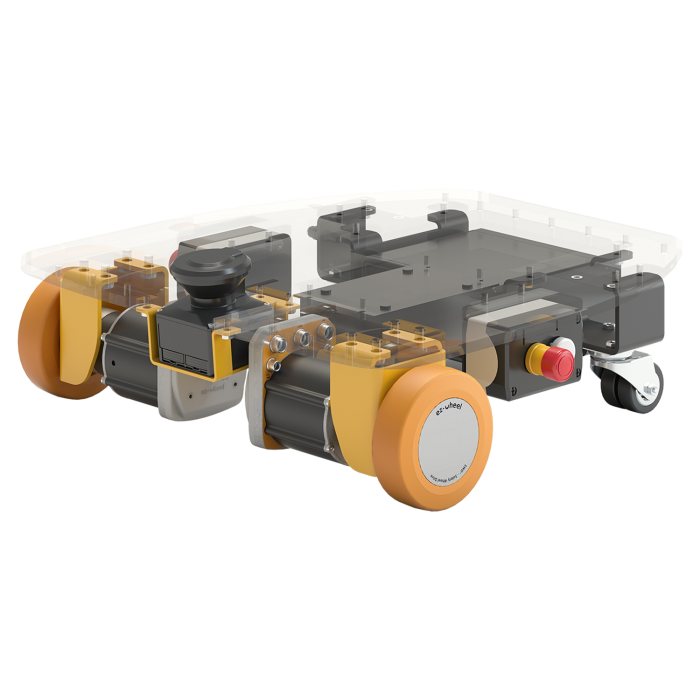
SWD® StarterKit Development kit for AGV and AMR |
This package has been tested on x64_86 and armhf machines. Pre-built packages are available for ROS Noetic on Ubuntu 20.04 (for x64_86 and armhf).
- Two SWD® based wheels
- Ubuntu 20.04
- ROS Noetic
swd-services (>= 0.1.0)
In order to install swd_ros_controllers, you need to add the ez-Wheel repository to /etc/apt/sources.list.
echo "deb http://packages.ez-wheel.com:8081/ubuntu focal main" | sudo tee -a /etc/apt/sources.listThen download and add the GPG key using following command:
wget -qO - http://packages.ez-wheel.com:8081/archive.key | sudo apt-key add -Now, you should be able to install the ros-noetic-swd-ros-controllers package using apt:
sudo apt update && sudo apt install ros-noetic-swd-ros-controllersTo compile the package, make sure you have added the ez-Wheel repository to your /etc/apt/sources.list as specified above.
Then you need to install swd-services using:
sudo apt-get update && sudo apt install swd-servicesIn the following instructions, replace <rosdistro> with the name of your ROS distro (e.g., noetic).
source /opt/ros/<rosdistro>/setup.bash
mkdir -p ~/ros_ws/src/
cd ~/ros_ws/src/
git clone https://github.com/ezWheelSAS/swd_ros_controllers.git
cd ..
catkin_make install
source ~/ros_ws/install/setup.bashThe package comes with a preconfigured .launch file for the SWD® Starter Kit:
roslaunch swd_ros_controllers swd_diff_drive_controller.launchOr you can run it with a custom configuration, the minimum required parameters are:
rosrun swd_ros_controllers swd_diff_drive_controller \
_left_swd_config_file:="/path/to/swd_left.ini" \
_right_swd_config_file:="/path/to/swd_right.ini" \
_baseline:=0.485This controller drives two ez-Wheel SWD® wheels as a differential-drive robot.
left_swd_config_fileof typestring: Path to the.iniconfiguration file of the left motor (mandatory parameter).right_swd_config_fileof typestring: Path to the.iniconfiguration file of the right motor (mandatory parameter).baseline_mof typedouble: The distance (in meters) between the 2 wheels (mandatory parameter).pub_freq_hzof typeint: Frequency (in Hz) of published odometry and TFs (default50).command_timeout_msof typeint: The delay (in milliseconds) before stopping the wheels if no command is received (default1000).base_frameof typestring: Frame ID for the moving platform, used in odometry and TFs (default'base_link') (see REP-150 for more info).odom_frameof typestring: Frame ID for theodomfixed frame used in odometry and TFs (default'odom') (see REP-150 for more info).publish_odomof typebool: Publish odometry messages (defaulttrue).publish_tfof typebool: Publish odometry TF (defaulttrue).publish_safety_functionsof typebool: Publishswd_ros_controllers::SafetyFunctionsmessage (defaulttrue).wheel_max_speed_rpmof typedouble: Maximum allowed wheel speed (in RPM), if a target speed of one of the wheels is above this limit, the controller will limit the speed of the two wheels without changing the robot's trajectory (default75.0).wheel_safety_limited_speed_rpmof typedouble: Wheel safety limited speed (SLS) (in RPM), if an SLS signal is detected (from a security LiDAR for example), the wheel will be limited internally to the configured SLS limit, the ROS controller uses this value to limit the target speed sent to the motor in the SLS case (default30.0).have_backward_slsof typebool: Specifies if the robot have a backward SLS signal, coming for example from a back-facing security LiDAR. If an SLS signal is available for backward movements, set this totrueto take it into account. Otherwise, set the parameter tofalse, this will limit all backward movements to the selectedwheel_safety_limited_speed_rpm(defaultfalse).positive_polarity_wheelof typestring: Internal parameter, used to select which wheels is set to a positive polarity (default'Right').control_modeof typestring: This parameter selects the control mode of the robot, if'Twist'is selected, the node will subscribe to the~cmd_veltopic, if'LeftRightSpeeds'is selected, the node subscribe to~set_speed(default'Twist').left_encoder_relative_errorof typedouble: Relative error for left wheel encoder, used to calculate variances and propagate them to calculate the uncertainties in the odometry message. Each encoder acquisitionDIFF_LEFT_ENCODERis modeled as:DIFF_LEFT_ENCODER +/- abs(left_encoder_relative_error * DIFF_LEFT_ENCODER)(default0.05corresponding to 5% of error).right_encoder_relative_errorof typedouble: Relative error for right wheel encoder, used to calculate variances and propagate them to calculate the uncertainties in the odometry message. Each encoder acquisitionDIFF_RIGHT_ENCODERis modeled as:DIFF_RIGHT_ENCODER +/- abs(right_encoder_relative_error * DIFF_RIGHT_ENCODER)(default0.05corresponding to 5% of error).
~cmd_velof typegeometry_msgs::Twist: Target linear and angular velocities (whencontrol_mode:='Twist', this is the default).~set_speedof typegeometry_msgs::Point: Target speeds in rad/s for left (Point.x) and right (Point.y) wheels (whencontrol_mode:='LeftRightSpeeds').~soft_brakeof typestd_msgs::Bool: Activate or release the soft brake, sendfalseto release the brake, ortrueto activate it.
~odomof typenav_msgs::Odometry: Odometry message based on wheels encoders, containing the pose and velocity of the robot with their's associated uncertainties. Unless disabled by thepublish_tfparameter, TFs with the same information are also published.~safetyof typeswd_ros_controllers::SafetyFunctions: Safety messages communicated by the wheels via CANOpen, the message includes information about Safe Torque Off (STO), Safety Limited Speed (SLS), Safe Direction Indication (forward/backward) (SDI+/-), and Safe Brake Control (SBC).
This message encodes the safety functions read from the SWD via CANOpen.
Header header
bool safe_torque_off
bool safe_brake_control
bool safety_limited_speed
bool safe_direction_indication_forward
bool safe_direction_indication_backward
For any questions, please open a GitHub issue.
ez-Wheel® is an innovative company founded in 2009 and located in Angoulême, France. The ez-Wheel company has developed the first industrial drive wheel, integrating electric traction motor, embedded electronics and rechargeable batteries.
This revolutionary solution, which quickly turns any manually handled platform into an electrically assisted one. Our solutions have been adopted by hundreds of end-users to improve productivity and prevent work accidents caused by manual handling. Our products are used in a variety of applications, in fields of Automotive, Factory logistics, Warehouses, Food processing, Hospitals and Pharmaceutical industries.
The new SWD® product family targets industrial robotics applications, like Autonomous Mobile Robots (AMRs) and Automatic Guided Vehicles (AGVs). It provides a unique solution for safety critical systems, which provides safety features according to the ISO 3691-4 standard.
The ez-Wheel® company has developed a unique know-how in embedded electronics, including safety critical systems, applied to battery powered electric traction.