These are the instructions for running the algorithm for the MDP task
-
Clone this repo, compile and run
Simulator.java -
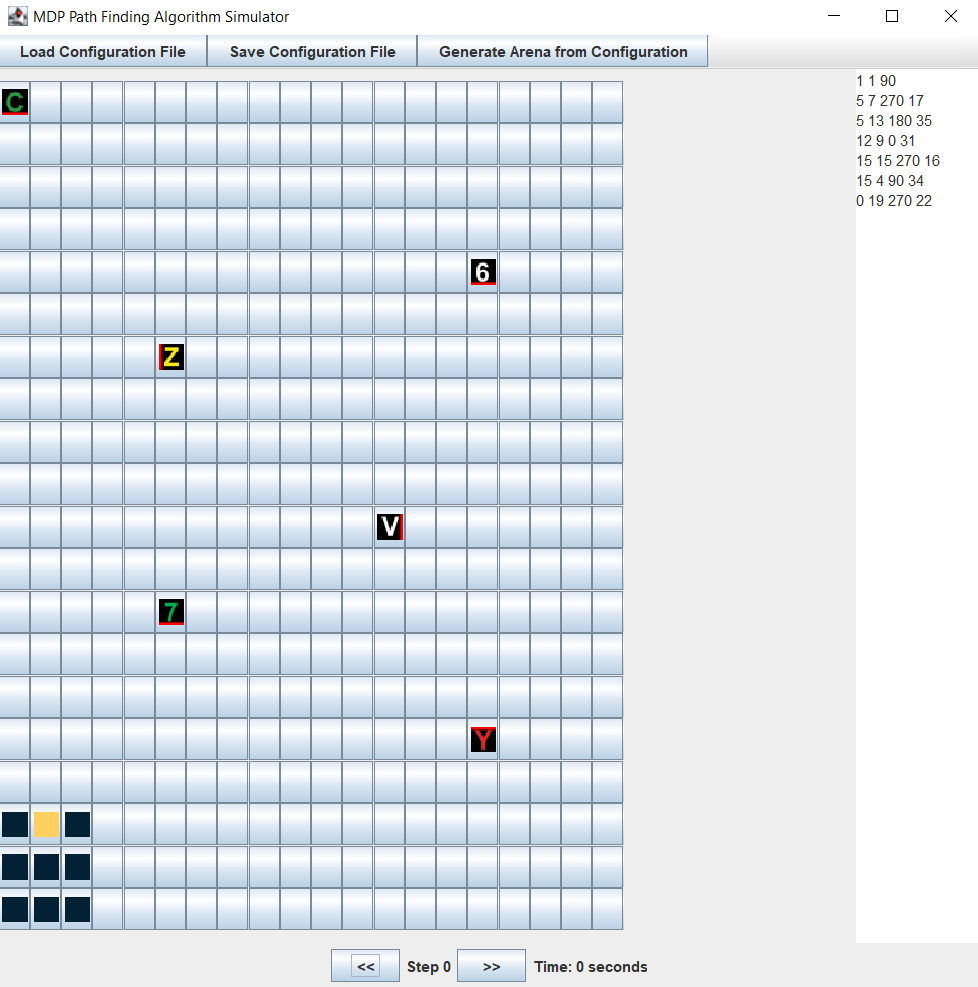
You will see a pop up window
-
Copy and paste the following onto the right most text box
1 1 90 5 7 270 17 5 13 180 35 12 9 0 31 15 15 270 16 15 4 90 34 0 19 270 22This is the configuration file
The first line represents [robot X coordinate, robot Y coordinate, robot direction]
The subsequent lines reprsent [obstacle x coordinate, obstacle y coordinate, obstacle direction, obstacle photo id]
-
Click on the Generate Arena From Configuration Button
-
You should see (or may not see depending on how you placed the obstacles) a sample of the arena
-
Click the front and back arrows to see how the robot moves. Note that it does not capture diagonal movements well

- Ensure that the Raspberry PI server is running first
- Configure your address and port of where you want to connect to
String address = "192.168.12.1"; int port = 10003; AlgoServer.algoServer(address, port);
- Compile and run
Server.java - You can send messages to the server via the command line
- You will also receive messages sent from the server
Socket connections were tested without the need for RPI by downloading this TCP/IP tool onto a smartphone device